- 文/潘炯丞
照明有兩個基本的目的:第一個是照亮物體,讓人看得清楚;第二個是還原物體本色,讓東西看起來漂亮。
譬如,夜間的街道照明,因為牽涉到交通安全,看得清楚就遠比看得漂亮得得重要;另一方面,精品珠寶店的展示櫃照明,為了讓產品更具有吸引力,看起來漂亮就會比節能或是看清楚來得受重視。

衡量一個照明系統或是光源能否清楚照亮物體,照明工程師會使用亮度相關的參數來評估,包含光通量(luminous flux)、輝度(luminance)與照度(illuminance)。一般人消費者選購檯燈或是燈源的時候,也可以從這些參數來選擇,例如兒童使用的學習檯燈,光通量最好大於 500 流明,桌面的中心最大照度最好有 750 勒克斯以上。
但是,你知道如何評價一個照明系統或是光源能否把物體照得漂亮嗎?或許你曾經聽過演色性(Color Rendering Index,一般縮寫成為 CRI 或是 Ra)這個名詞,它就是目前照明業界最常用來評價燈源或是照明系統能否把物體照得漂亮的主要參數。那麼,演色性是什麼意思? 一般消費者應該怎麼理解這個參數? 在實際應用上演色性又有什麼限制呢?
八個標準測試色票,決定演色性高低
在1965 年,國際照明委員會 CIE(International Commission on Illumination)制定了 CIE Test-Color Method,以便有個一致的方法來評價光源對於色彩的「表現能力(color rendering)」。
這個方法選定了八個顏色做為標準測試色票(test-color sample),藉由比較八個色票在受測光源與標準光源照射下的色度座標偏差,計算出 R1~R8 等八個演色性指標,再計算這八個演色性指標的平均值,即可得出 CRI 數值。CRI 的數值介於 0~100 之間,如果受測光源的色彩表現能力越接近標準光源,CRI 的數值就會越高。
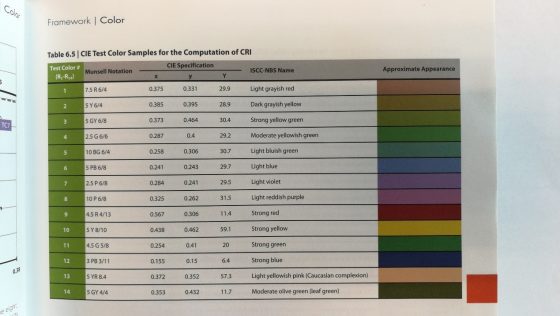
由於 R1~R8 這八個標準色票主要是偏淡的不飽和顏色,為了讓色票取樣更具代表性,因此 CIE Test-Color Method 定義了另外六種特殊色票,包含紅色、黃色、綠色與藍色等四個飽和色,分別為 R9~R12,以及白人膚色(R13,Light yellowish pink ,Caucasian complexion)與橄欖綠(R14,Moderate olive green,leaf green)等兩個特殊色。其中,R9 代表飽和紅色,與膚色的表現有關,所以照明行業在評價演色性的時候,除了 CRI 之外,也會特別考慮 R9 的高低。
然而 CRI 僅僅比對光源在八個顏色的色彩表現能力,以整個光譜來說,是很少的取樣數量,因此有其侷限性。特別是針對 LED這一類的窄頻譜光源(narrow band spectra),單純以 CRI 作為色彩表現的評價,就會有所偏差(註一)。依據美國照明工程學會(IES,Illuminating Engineering Society of North America)的建議,對於 LED 光源的顏色評價,還是應該以實物模型(mock-up)的展示較具參考價值。
演色性的計算方式有哪些限制?
從 CRI 的計算方式,可以發現它有一些明顯的限制。
首先,它是八個數值的平均,因此可能出現某個燈源對於特定顏色的表現能力不佳(亦即某個 Ri值特別低),但平均之後的 CRI 卻是高的。其次,CRI 測量時所使用的八個色票都是不飽和的顏色,這會造成一個無法展現鮮豔飽和色彩的光源,卻可以測出很高的 CRI。
此外,CRI 量測方法裡,對於任何偏離八個標準色票的色度空間移動,都是給予負面的評價,也就是扣分。但由於 CRI 的八個色票均為不飽和色,如果有一個光源可以讓物題呈現更加飽和鮮豔的色彩,雖然這會是人眼比較偏愛的方向(我們多數情況下喜歡鮮豔飽和的顏色、而非黯淡的色彩),但是在 CRI的評價方法上,卻會得到比較低的分數。

CRI演色性的替代方案
由於 CRI 衡量光源色彩品質的方法有上述的幾個缺點,幾十年來各國際標準組織與照明業界試圖尋求新的光色品質評價方式。從 1967 年開始,目前總共創造出不下十種的光色彩展現能力指標(註二)。在這些指標中,由美國國家標準暨技術研究院(National Institute of Standards and Technology, NIST)所開發的光色品質量表 Color Quality Scale (CQS)是目前除了 CRI 之外,比較被學界與業界認可的評價方法。

CQS 與 CRI 的量測方式,主要差異在標準色票的選擇。CRI 最受爭議的是它採用色票都是非飽和顏色,因此 CQS 改採十五個飽和度較高的顏色做為標準色票,這樣的調整,使得 CQS 更加適用於新興的固態照明市場、也更加符合人們對於飽和鮮艷顏色的偏好。

雖然 CRI 仍有許多改進的空間,也不盡然適用於 LED 燈源,但是照明業界仍舊偏好單一數值的評價方式(只看一個數字就知道光線的顏色表現能力好不好,並不精準,但是簡單好用),同時也不希望新的評價方式改變了既有燈源的評價分數,因此 CRI 至今仍是唯一受到國際組織與照明業界認可的光源色彩評價方法。
跑個題,演色性高低與護眼有關係嗎?
從演色性的定義我們可以知道,該數值的高低主要關係受測光源或是燈具對於八種特定顏色色票的顏色再現能力,數值高代表光線越能呈現物體的真實顏色。那麼,呈現物體的真實顏色可以保護眼睛嗎?
答案是,兩者沒有關係。
光線影響眼睛健康的因素主要與亮度、頻閃、還有藍光危害有關。照明不夠亮,睫狀肌需要用力、人眼容易疲勞,同時長期下來眼軸會因此增長,導致近視發生。頻閃嚴重的燈具可能引發使用者頭痛、甚至癲癇發作的可能。至於藍光危害則可能造成視網膜的黃斑部受損。以上三者是影響眼睛健康的主要因素,至於演色性,只和光線的顏色展現能力有關,與眼睛健康沒有關係。

高演色性的光源主要使用於博物館照明或是需要對色、校色的工作場所,例如攝影與出版行業。在這些情況下,通常會要求 CRI 90 以上的光源,至於一般生活中,我們很難察覺到不同的照明光線所造成的物體顏色差異。例如,我們不會明顯察覺到一件洋裝在戶外陽光(CRI 100)下的顏色與辦公室照明(CRI 80)下的顏色有所不同。
但是,即使是一般的閱讀,光源呈現的物體顏色的能力如果不佳,仍舊會影響閱讀的感受,所以美國能源之星(Energy Star)就規定 LED 燈具的 CRI 需要高於 80,同時 R9 應大於零。那麼,如果拿 CRI 90 以上的燈源來閱讀,會比 CRI 80 有更好的體驗嗎?一般人的感受或許不明顯,對於色彩比較敏感的人可以察覺 CRI 90 的光線偏紅,而 CRI 80 的光相比之下則沒那紅。事實上我們長久以來慣用的螢光燈管,它的 CRI 一般介於 80~85 之間,而戶外陽光的 CRI 則是 100,但是一般人並不會意識到兩者對於顏色展現的差異。

色彩本身是連續、而且豐富多變的,僅僅使用單一 CRI 的數字來表達一個光源的頻譜特質,本身就是有侷限性的。因此,CRI 的數值可以參考,但是想知道一個光源的色彩表現能力,還是眼見為憑。如果真想追求光源的高演色性,在陽光下閱讀是個好選擇。回到室內,CRI 高於 80 的光源就夠用了。但是,如果想要保護眼睛,更重要的考量應該是夠亮、不頻閃,還有低藍光的光源。
- 註一: Rationale of Color Quality Scale (2010) by Yoshi Ohno , Wendy Davis
- 註二:The Lighting Handbook, 10th edition, Illuminating Engineering Society of North America, Table 6.7 Indices of Color Rendition. P6.24