模擬驗證技術主要是為了預測、分析系統開發的特性及響應關係,透過模擬提供多種複雜條件下系統作動之響應行為,預先分析其環境條件、控制模組與系統物理特性關係是否符合預期。中心先進駕駛輔助系統開發之模擬驗證技術,依據環境感測模擬軟體建置 ISO 國際標準以及廠規測試驗證情境 (PreScan),提供 ADAS 主動安全系統演算法開發模擬驗證 (MATLAB/Simulink),並結合 CarSim 環境建置車輛動態,模擬車輛於實際道路路況之表現,確保 ADAS 控制系統演算法開發符合實際需求與安全規範。
ADAS 這樣守護你:車道維持、巡航控制、自動煞車
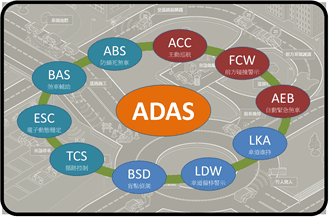
ARTC 開發一套自動輔助駕駛系統,主要由三項 ADAS 主動安全系統整合而成,包括車道維持輔助系統 (Lane Keeping Assistant Systems,LKAS)、自適應巡航控制系統 (Adaptive Cruise Control Systems,ACCS)、自動緊急煞車系統 (Autonomous Emergency Braking Systems,AEBS),下列將介紹各次系統控制原理及流程。
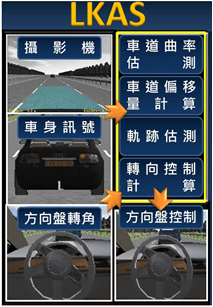
車道維持輔助系統 (LKAS)
為了預防駕駛因疲勞而偏離車道,LKAS 系統利用車輛前方攝影機、車身訊號、方向盤轉角訊號,計算本車與車道中心線之偏移量,當駕駛有不當偏離車道時,系統將介入修正方向盤,使得車輛可維持於車道上而不偏離。
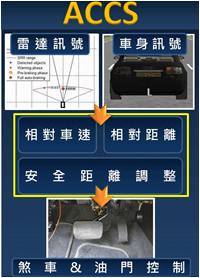
自適應巡航控制系統 (ACCS)
ACCS 是一種行車跟隨系統,藉由雷達偵測前車資訊,進而控制本車之行進車速,以確保行車的安全距離,而駕駛可透過安全距離之調整改變跟隨距離之遠近。
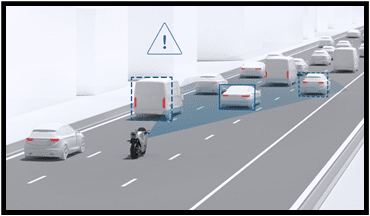
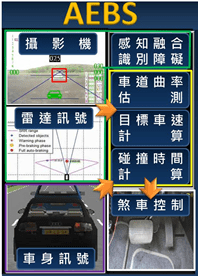
自動緊急煞車系統 (AEBS)
AEBS 透過影像與雷達感知融合技術,增強前方障礙物偵測之穩定度與精準度,並搭配車身訊號計算本車與障礙物之間的相對關係,最後透過系統的防撞決策來降低與前方撞擊之危險。
上路前,先進場模擬:ADAS 的模擬驗證技術
系統模擬驗證主要區分成三部分「測試情境」、「ADAS 主動安全系統演算法」、「目標車輛之物理模型」並透過相對應之軟體進行模擬,系統開發流程如下圖所示。
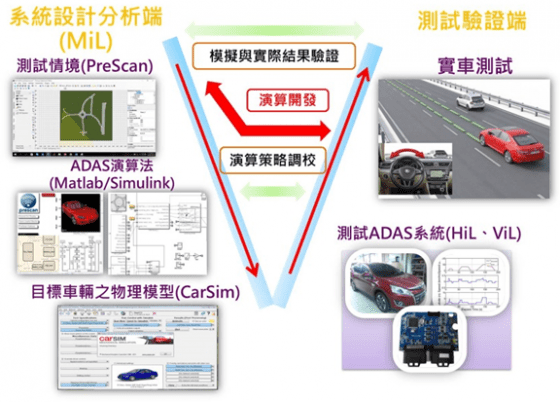
- 測試情境:透過 PreScan 對外部環境及感測器的高度仿真,作為測試演算法前端之輸入資訊。
- ADAS 主動安全系統演算法:利用 MATLAB/Simulink 強健的開發工具,可制訂模塊對於各種時變系統,如控制、通訊、信號處理、影像處理和圖像處理系統等進行模擬、測試,也可以進行基於模型的設計。
- 目標車輛之物理模型:利用 CarSim 對於實車車身姿態、行為、響應具有高精度之相似度,提供開發人員修改車輛參數、模型以達到符合模擬之層面。
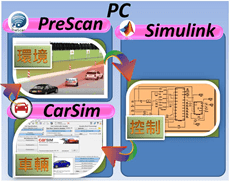
Model in the Loop (MiL)
MiL 定義為「測試案例 @PreScan」、「演算法 @MATLAB/Simulink」、「物理模型 @CarSim」皆在純模擬環境下執行驗證,其優點為可快速測試演算法邏輯,並簡化過於複雜之測試流程,如下圖。
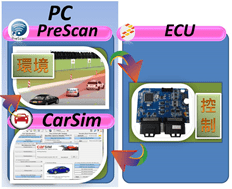
Hardware in the Loop (HiL)
藉由 HiL 來執行測試,主要是在演算法開發階段尚未完成前,先建置控制器的驗證迴路,並在模擬驗證環境中導入失效驗證情境,能實際測試車用控制器在不同的失效階段下,以了解控制器存在危險性及風險的情況,控制器是否實施緊急保護措施。HiL 模擬可幫助開發工程師在虛擬環境中有效地測試嵌入式控制器。
Vehicle in the Loop (ViL)
定義為將實車運動資訊回傳至虛擬環境中之驗證車輛,確保虛擬驗證車輛可與實際車輛之運動姿態相同,並透過虛擬感測模組偵測虛擬場景中之驗證車輛與對手車輛或相關物件之互動關係,再將此互動資訊傳輸至系統控制器 (ECU),控制器依感測資訊下達控制命令控制實際車輛之轉向、煞車或油門等底盤模組。
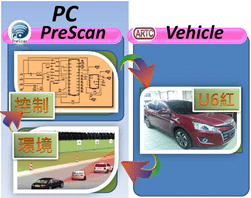
考駕照就考駕照,為何需要模擬驗證系統?
模擬驗證主要是幫助減少演算法開發時程以及改變 try and error 開發流程,以及利用工具可以提早進行複雜場景測試及場景重現,利用 PreScan 建置各種測試環境,且提高測試情境之複雜度,將測試情境導入 MiL 測試可提高演算法功能上的確定性;HiL 測試可驗證單純在模擬環境下結合 ECU 後兩者輸出結果是否一致;ViL 測試則為了提高實車測試驗證安全性,因此利用 PreScan 模擬環境條件提供真實車輛進行 ADAS 系統演算法開發驗證,最後再進行實車道路情境測試確保系統功能之完整性、可控性以及系統穩定性、強健性。
 本文出自財團法人車輛研究測試中心;原文於此,如需轉載,歡迎與車輛中心聯繫。
本文出自財團法人車輛研究測試中心;原文於此,如需轉載,歡迎與車輛中心聯繫。