八爪博士 4ni!?《蜘蛛人》裡的人造太陽或將問世?(上)
說明:此篇文章原本乃為泛科學 Youtube 影片所寫,經簡化之後,拍攝成〈缺電、輻射、核廢料有解嗎?「核融合發電」有可能嗎? 〉和〈最受期待的核融合發電在哪裡?能源數據誰在膨風? 〉兩部作品。又,本文並不針對核融合的技術性問題多做解釋,而是想用最少的字數,讓讀者瞭解核融合發展的全貌與大致進程。同時,此文主題也跟「世界是否應該採用核能發電」、「臺灣是否該使用核能發電」、「台灣是否該重啟核四」無關;這是三個完全不同的問題,核融合發電跟現有的核能發電技術也有所不同,無法一概而論。
《蜘蛛人:無家日》 來說,在公開預告片中可見到知名反派八爪博士的回歸;他不但是研究核能的科學家,在《蜘蛛人2》 還打造出了核反應爐。
《蜘蛛人2》公開預告片中的核反應爐。截圖自 YouTube 。 八爪博士的核反應爐,跟太陽可說有 87 分像;姑且不論畫面呈現得正不正確,這部機器特別的地方就在於,它是核融合反應爐,而非目前核能發電所用的核分裂反應爐。然而,這兩者差在哪裡?都已經有核能發電技術了,為什麼還要研發核融合發電?不僅如此,核融合研究甚至一度引發學術界的爭議醜聞,甚至被拿來拍成 IMDb 超低分的電影。
傳統核能發電的發展趨勢 不久前(2021 年底),臺灣舉辦了是否重啟核四的公投。在選舉期間,我們或許聽過不少關於核能發電的利弊分析與討論。在溫室效應越來越受到關注、以及強調 2050 年要淨零碳排放的現代,核能發電極低的碳排放,是不容忽視的優點;但另一方面,核廢料問題,和核子事故風險,也是反核人士眼中無法接受的缺點。
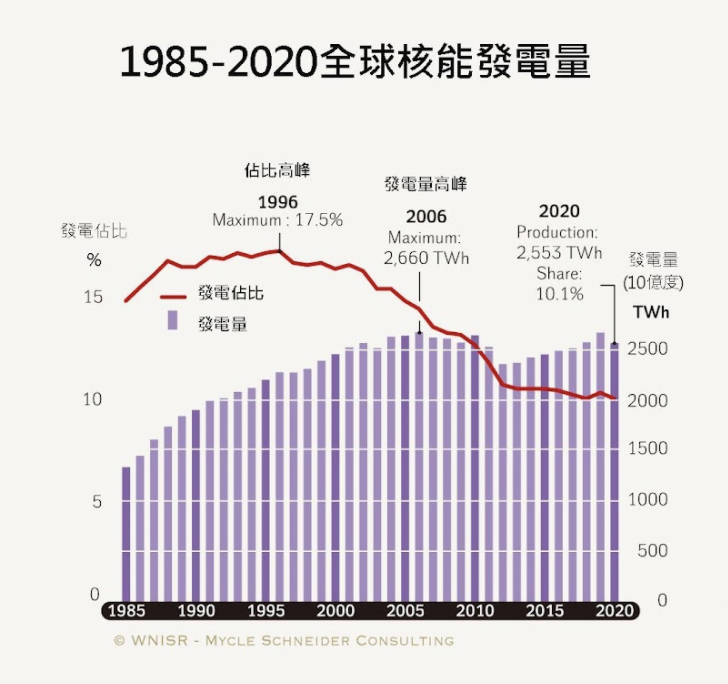
不管如何,近數十年來,全球核能發電量雖然在日本福島核災後一度減少,但整體而言,仍大致呈現緩慢增長的趨勢。不過,核能在全球的發電佔比,則是於 1996 年達到 17.5% 的高峰後,開始緩慢下降。
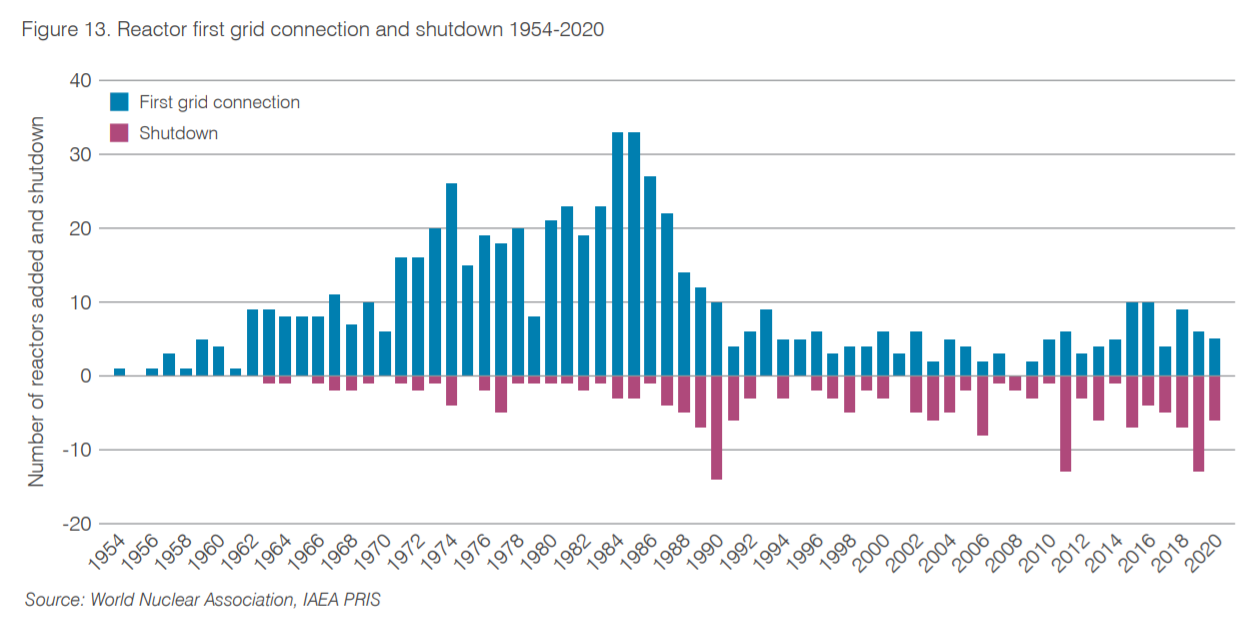
全球核能發電佔比於 1996 年達到最高峰。圖/《2021 世界核能產業現況報告》(The World Nuclear Industry Status Report 2021, WNISR 2021) 另一方面,若比較從 1954 年到 2020 年,「開始運轉的核電廠」和「停止運作的核電廠」兩者的數目。可以發現,在 1990 年之前,開始運轉的核電廠,遠比停止運作的核電廠要多得多。但從 1990 年開始,兩者就呈現差不多的趨勢。
從 1954 年到 2020 年,開始運轉的核電廠數目(靛青色)和核電廠停止運作的數目(紫紅色)的比較。圖/World Nuclear Performance Report 2021 COP26 Edition 基於上述統計資料,大抵可以說,因為總總複雜的原因,不管是對是錯,在上世紀 90 年代以後,核電廠慢慢地不像以前那麼受到歡迎。而近年來對溫室效應的關注,以及仍是現在進行式的俄烏戰爭,會對核能發展帶來什麼影響,有待我們持續關注。
為什麼要研究核融合發電? 就在核能前景尚未完全明朗的同時,我們卻也能在許多新聞媒體上看到,除了新式核分裂發電技術的研發之外,還有「Google 和比爾蓋茲投資核融合反應爐」、「世界最大核融合反應爐進入組裝階段」、「中國核融合再創新世界紀錄」、「核融合新創 Helion 獲 22 億美元資金」、「貝佐斯投資核融合新創」等,關於核融合發電的消息;美國政府和其他許多國家也都投入資源在核融合研究。
同樣是核能發電,核融合發電和傳統的核分裂發電,有什麼不一樣?為什麼許多國家與知名人士都對核融合發電寄予厚望?八爪博士又為什麼打擊蜘蛛人的正事不幹,要去研究核融合?(搞錯重點了好ㄇ)
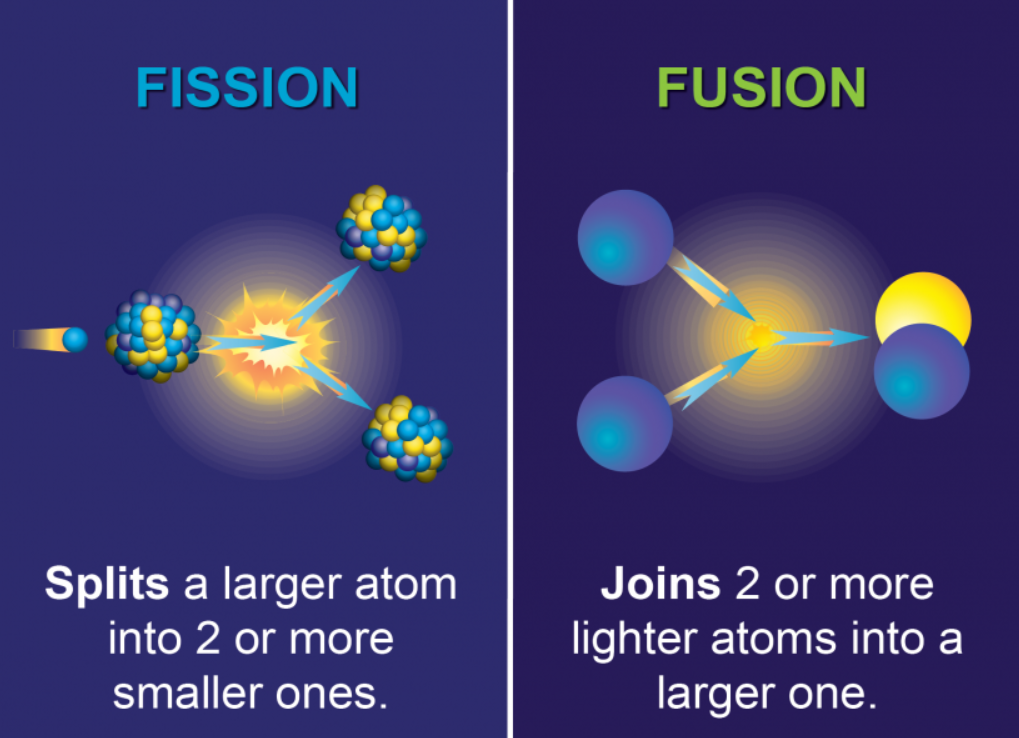
核反應的類型 簡單來說,核反應可分成兩大類,一是原子核分裂成其他較輕原子核,稱為核分裂(nuclear fission);另一則是,兩個以上的原子核結合成新的原子核,稱為核融合(nuclear fusion)。因為核反應往往伴隨能量的吸收或釋放,核能電廠於是利用這一點,擷取核分裂過程中釋出的能量,作為發電之用。
至於太陽,主要由氫構成。龐大的重力將氫向內擠壓,於太陽核心產生極端的高溫和高壓,並促使氫進行核融合反應成為氦,連帶產生能量。目前的核融合研究,目的就是在地球上複製這個過程,以獲取釋出的能量。只不過,地球上並不存在如太陽核心般的高溫和高壓,所以必須人為地製造出適合的環境,核融合發電才有可能實現。也因此,有人會把核融合技術形容成人造太陽,而《蜘蛛人 2》電影裡,八爪博士製造出的核融合裝置,就長得一副太陽的樣子。
核融合發電的優點與困難 相較於傳統的核能電廠,核融合發電擁有許多優點。首先,在許多人擔心的安全性問題上,核融合發電不可能出現像是爐心熔毀或熱失控等狀況 。因為核融合發電所需的「燃料」(雖然核反應不算是燃燒)需要人為持續提供,而且核融合反應的環境也需要精密控制,所以一旦系統出現狀況,就會使得整個發電程序停止運作——換言之,不可能「爆走」。
但核融合發電在安全性上的優點,也是它最大的缺點 ——因為核融合反應實在太容易動不動就停止了,科學家們想方設法,目前也沒辦法做到讓反應爐持續不間斷地運作;換言之,它不具有商業發電的價值。也是因為這樣,我們在新聞裡常會看到,某國科學家成功突破紀錄,讓核融合反應持續了幾秒鐘或幾分鐘。而如何讓核融合反應爐能夠持續運作,就成為相關研究最重要的課題之一。
除了安全性問題之外,核能發電產生的核廢料也常為人所詬病。不可否認,目前的核能發電方式,會產生具輻射性的核廢料 ,半衰期從數百年到百萬年不等,而台灣一直未能設立核廢料的最終處置場,全世界至今也沒有任何一座高階核廢料處置設施正式運轉。預計最快要到 2024 年,在芬蘭才會有全球第一座的高階核廢料永久處置場正式啟用。然而,臺灣的地質條件跟芬蘭完全不同,能否找到適合的最終處置場,仍是個問號。
那麼在核融合發電,也會面臨核廢料的難題嗎?答案既是,也不是。核融合發電也會產生核廢料,但其屬於低階核廢料 ,基本上就是工作人員使用過後的防護衣和清潔用品,以及反應爐的腔壁等。這些核廢料的半衰期大體而言都不長;因情況而異,約數十年到數百年,其輻射水平即可回覆到接近一般環境的背景值。所以,做為結論,核融合發電還是會產生核廢料,但相較於現有的核能發電,其危險程度以及對環境的影響要小上很多。
最後,核融合發電還有另一個優勢:燃料。現在的核能發電,主要使用鈾 -235 做為燃料;雖然全球的鈾礦礦藏相對豐富,根據世界核能協會(World Nuclear Association)的估計,足夠人類再使用 90 年,但並非取之不竭。相對地,核融合發電常用的燃料是氫的同位素 ——氘和氚;而氫在地球上極為豐富,要製備氘和氚也並不困難。換句話說,人類完全不需要擔心核融合的燃料不夠這種事情。除此之外,在核融合過程中,還會運用到鋰,它可幫助生成反應所需的氚,而幸好鋰的存量在地球上也是非常豐富,若把陸地上和海洋中的鋰都考慮進來,同樣不需要擔心鋰會用光。[1]
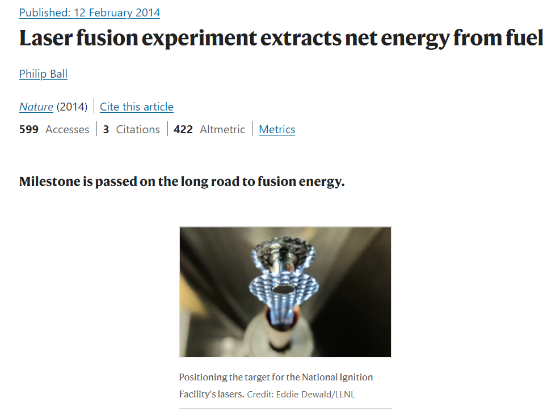
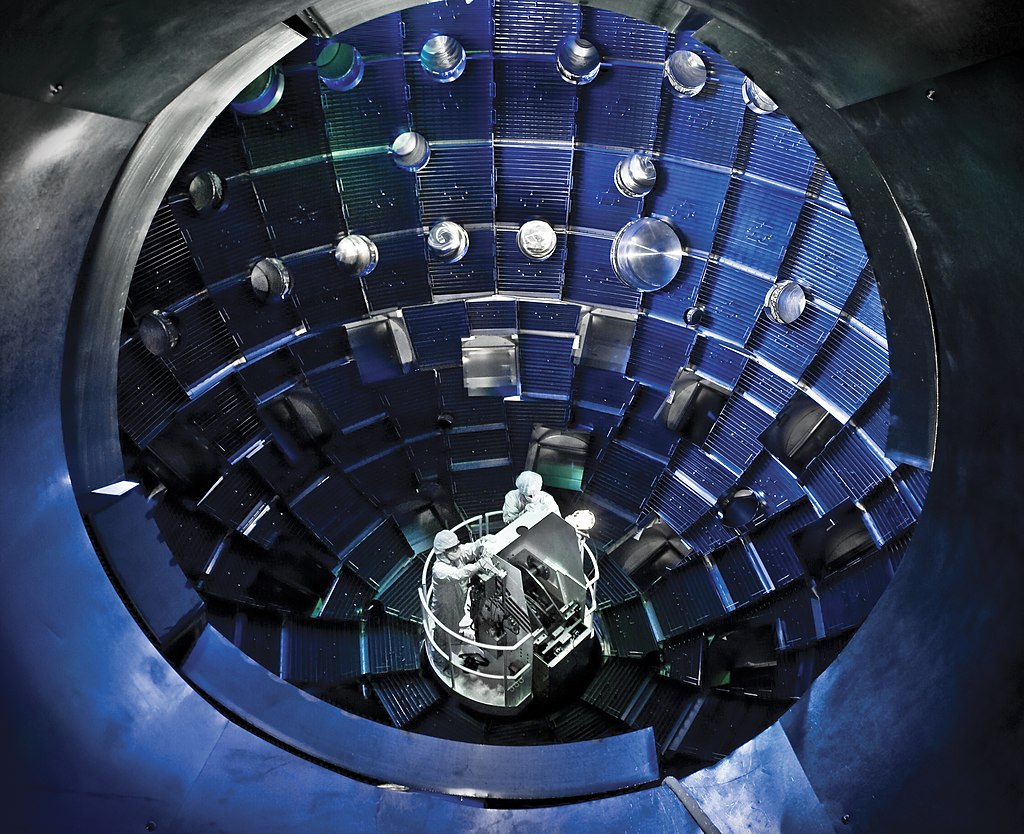
核融合發電的分類 在核融合發電中,為了讓相異原子核能夠進行融合,一般會將其加熱到一億度上下的高溫。一種作法是,利用雷射直接或間接加熱裝了燃料的膠囊,以誘發膠囊內部燃料的核融合反應,稱為慣性局限融合 (Inertial confinement fusion)。
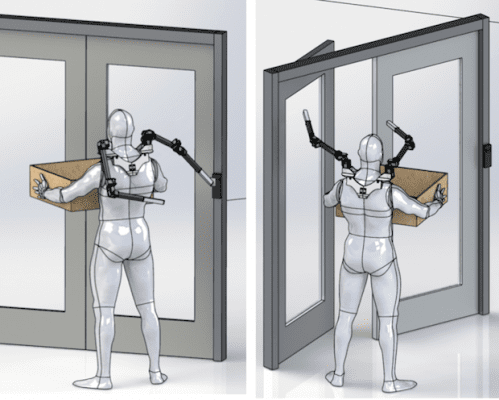
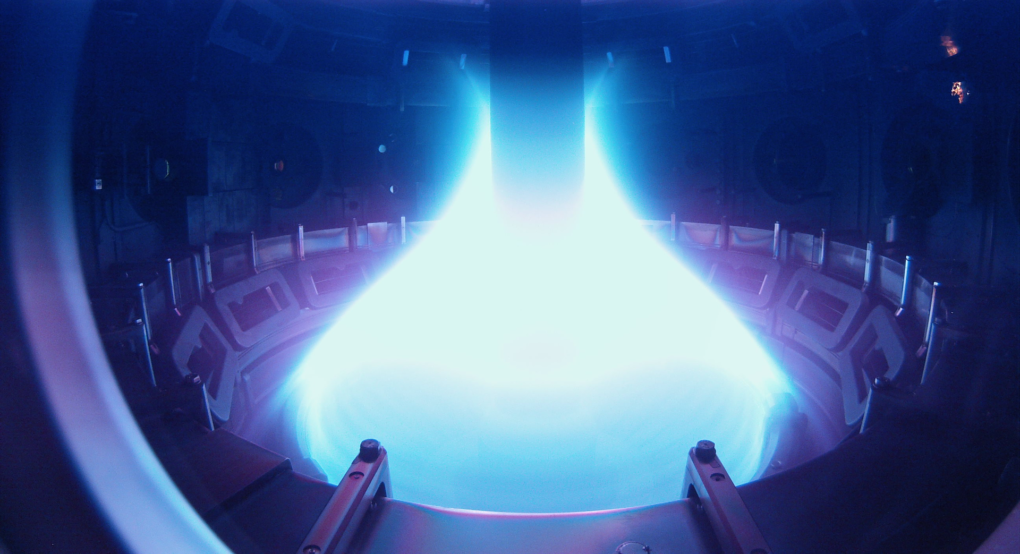
美國國家點火設施(National Ignition Facility)的核融合研究,就屬於慣性局限融合。圖/Wikipedia 磁局限融合 (magnetic confinement fusion)。八爪博士製造的機器,就比較接近這樣的作法。但跟電影不同的是,現實裡的研究人員是不可能直接站在高溫電漿旁邊的。八爪博士的設計,跟現實不但有差距,而且也顯然更危險。
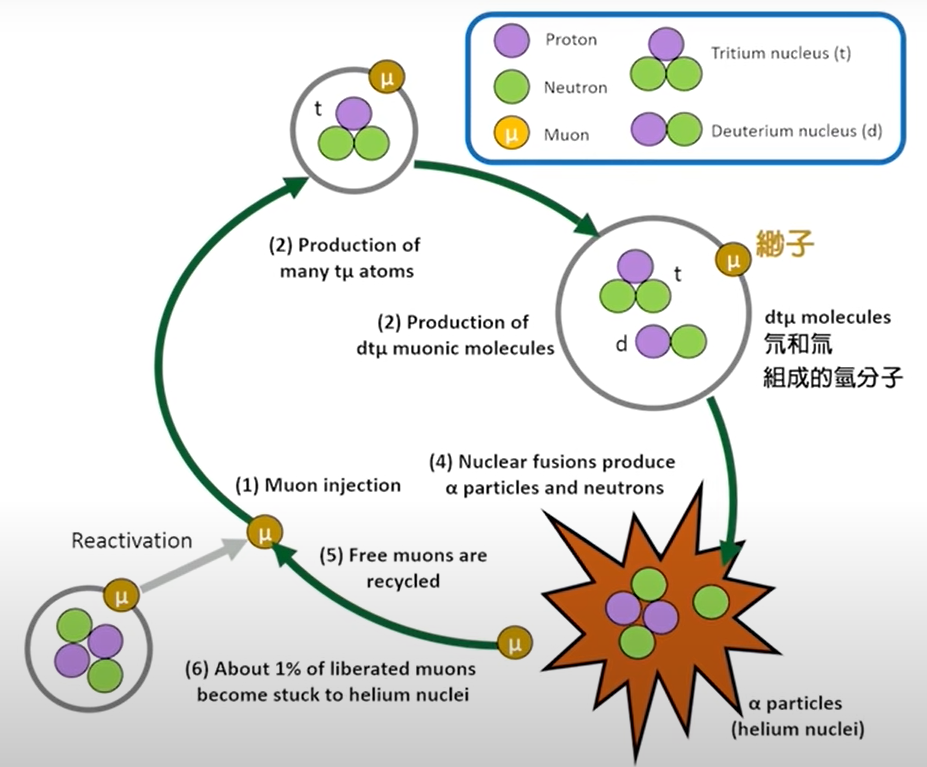
英國的磁局限融合裝置Mega Ampere Spherical Tokamak。圖片中的發光物質即為高溫電漿。圖/wikipedia 上述核融合發電方式,全部都需要人為地產生高溫,讓核融合得以發生——但這並不表示核融合只能在高溫環境中產生。實際上,早在 1950 年代,科學家就發現,確實有核融合反應在低溫環境即可發生,現在稱為緲子催化融合 (muon-catalyzed fusion)。緲子是一種性質跟電子非常類似,但質量比電子大得多、且非常容易衰變的基本粒子。若在氘和氚組成的氫分子中,用緲子取代電子,那麼該氫分子內部的氘和氚,甚至在室溫就可能產生核融合反應。
只不過,緲子的備製不僅需要花費大量能量,其迅速衰變的性質,也讓我們很難拿來作為核融合發電之用,再考慮到其他的技術性問題,使得目前的核融合研究,都是朝著高溫的方向進行。
然而,1989 年,有兩位科學家聲稱,成功在室溫環境下,以他們發現的新方法實現了核融合反應。這樣的消息迅速獲得媒體注意,並被大肆報導,人們對實現低溫核融合又開始寄予期望。很可惜地,其他科學家嘗試複製兩人的實驗成果,卻都無法成功;另一方面,科學社群也發現了兩人實驗上的瑕疵。於是,沸騰一時的「冷融合」話題就這麼煙消雲散。現在,雖然仍有少部分人從事相關研究,但都未能成氣候。
1989年5月,冷融合議題登上時代雜誌封面。圖/TIME 儘管如此,或許因為冷融合很有話題性,這個議題並未在媒體上消失;2011 年美國好萊塢甚至以冷融合為主題,拍了一部 IMDb 超低分的電影,英文片名就是冷融合(cold fusion),臺灣翻譯成《關鍵核爆》,劇情甚至把幽浮(UFO)都扯進來了。
延伸閱讀:八爪博士4ni!?《蜘蛛人》裡的人造太陽或將問世?(下)
參考資料 [1] 其實,鈾也存在海洋中。若考慮到海水中的鈾,那麼基本上人類也不用擔心鈾礦不足。只不過,鈾在海水中濃度極低,約 10 億分之 3,不論在運用的技術還是成本上,挑戰都很高。















-200x200.jpg)













{kind=link}