科景
・2011/02/10
披鐵甲的深海螺─Crysomallon squamiferum外殼為硫化鐵的“三明治”層狀結構,具備耐高壓、耐溫及耐腐蝕的特性,對改善承重和防護工程材料的發展,擁有極大的潛力。
Scimage
・2012/01/30
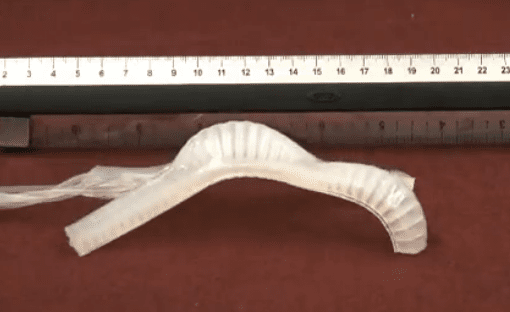
但是有一類的生物,像是軟體動物,是利用軟組織本身的變形來做運動,沒關節、沒骨骼,這類運動卻很少被應用在機器人身上,現在研究人員利用類似的想法做出了下面這個軟的爬行機器人...
馥林文化
・2012/05/09
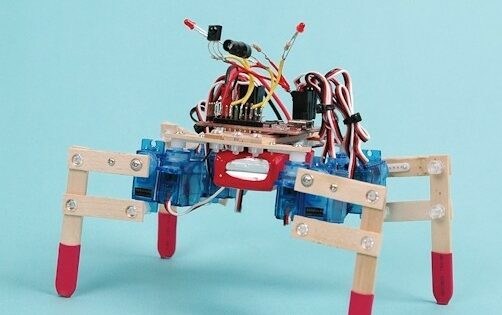
這隻我叫它「小怪獸」的四腳仿生機器人,打造完成後,有著兩顆一閃一閃十分討喜的紅色眼睛。它除了可以做伏地挺身外,還能走迷宮。當小怪獸走不出迷 宮時,兩顆紅色的眼睛會閃得更快了,並不斷地轉動自己的身體,一副著急想趕快找到出口的樣子。以下我將說明如何利用SC8來製作這臺可愛的小怪獸。
馥林文化
・2012/05/09
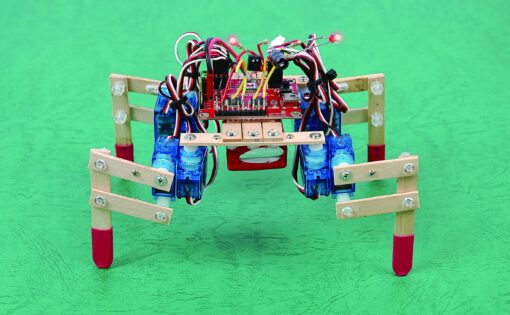
基本上到目前「小怪獸」的硬體算是完成了。原來規劃還有LED與紅外線感測器部分,我們等到「小怪獸」可以行走了之後再來加裝。現在請開啟 InnoBASIC Workshop 2環境,到「動作編輯器」的主畫面(圖A)。機器人最基本的行走原理就類似早期的卡通影片,將許多的靜態畫面連續播放,就形成了動態的畫面。這時候如何正 確而精準地將一個動作拆成幾個分解動作,就是機器人運動能力優劣的關鍵了。
馥林文化
・2012/05/10
現在「小怪獸」已經可以靈活的動作了,來一段有趣的舞蹈也是不難事。前面有提到我們想替「小怪獸」裝二個LED與紅外線感測器(圖A),讓它看起來更酷更聰明,現在就繼續努力吧!

馥林文化
・2013/03/04
由臺灣大學BioRoLa實驗室製作的輪足複合機器人(Quattroped)與六足仿生機器人(miniRHex),以獨特的運動方式來適應各種地形,提供了不同於以往的觀點,讓大家對機器人有更多樣化的想像。本篇將為各位更詳細的介紹這兩臺頗具特色的機器人。

dr. i
・2013/05/14
所謂的仿生的意思,當然就是經由觀察動物或植物的行為,用人工的方式設計出可以模擬這些行為的機構。那麼為什麼要大費周章地去模擬動植物的行為呢?演化論告訴我們所有這些行為都有某種適應環境的功能。

馥林文化
・2013/07/24
將藝術與科技結合,可以激發出什麼樣的火花?工研院的舒靜珉開發設計出具有娛樂、美觀、具發展性的水下機器人「水之械」。目前「水之械」已有五代, 每一代都有不同的設計構想,雖然都有著以魚為設計概念的仿生外觀設計,但每代獨特的研發技術卻創造出不同的差異性。科技與藝術相結合,將為我們的未來世界 添加更多的美感。

週日閱讀科學大師
・2013/12/10
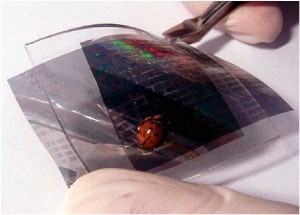
自然界中有一種甲蟲,利用特殊的分泌物,讓蟲卵可以緊緊的附著在蘆筍上,以確保後代繁殖的安全。如果模擬甲蟲分泌物中的成分,合成我們想要的接著劑,就可以克服更多材料上接著的問題。