各位讀者好, 認識了如何用MCS來控制LinkIt ONE 的腳位狀態之後,接下來兩期會帶領您實作雲端氣象站專題。本期要介紹的是智慧居家或植物照護系統中常用的溫濕度感測模組,也會告訴您如何將感測器讀取到的溫度與濕度變化顯示於Arduino IDE 的Serial Monitor 中。到了下一期,就要把資料上傳到MCS 雲服務上囉。想像一下,走到哪裡都可以監控家裡的狀況,這樣也會心安一點吧。本專題可以在MCS 上檢視家中溫度、濕度與氣壓的變化。您可以根據這樣的架構加裝更多您想要的感測器與受控裝置。
MCS 也一併提供了Android 應用程式, 請由此連結(https://mcs.mediatek.com/v2console/supports/
mobile_application)或在Google Play搜尋「 MediaTek Cloud Sandbox」,接著安裝到您的Android 裝置上。開啟程式後只要登入您先前所註冊的MediaTek Labs 帳號, 就能在手機端即時檢視或控制開發板的狀態。
所需零件:
• LinkIt ONE開發板,1片
• Wi-Fi/藍牙天線,1組
• Grove溫濕度感測器模組(Grove – Temperature and Humidity Sensor Pro)
• DHT11/22溫濕度感測模組(根據上一零件選用)
• Base Shield擴充板
• 麵包板與線材(根據上一零件選用)
Grove 溫濕度感測器模組
本專題會在LinkIt ONE 上加裝一個Grove 溫濕度感測器( 圖1a) 來量測溫度與濕度的變化。其中的Grove溫濕度感測器, 實際上就是整合了DHT11 溫濕度感測器( 圖1b) 的模組。請注意, 如果您是自行購買DHT11 溫濕度感測器的話, 需要匯入DHT 函式庫(http://playground.arduino.cc/Main/DHTLib)。另一方面,由於Grove 溫濕度感測器模組有針對LinkIt ONE 進行最佳化, 也有自己的函式庫(https://github.com/Seeed-Studio/Grove_Temperature_
And_Humidity_Sensor),您如果直接在LinkIt ONE 上使用DHT11 感測器時,有時候讀到的數值會不規則跳動。
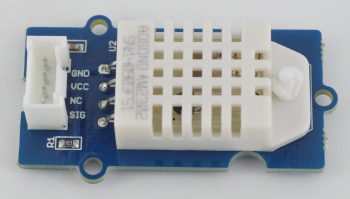
圖1a Grove 溫濕度感測器。
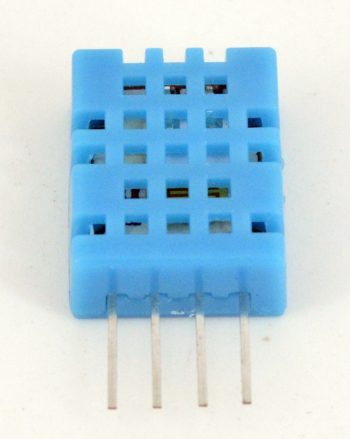
圖1b D H T 1 1溫濕度感測器。
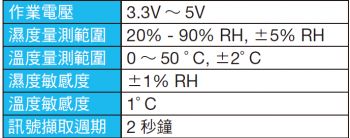
表1 Grove 溫濕度模組規格
硬體接線
請將Grove 溫濕度感測器接到Base Shield 上標示A0 的Grove 接頭,如下圖:
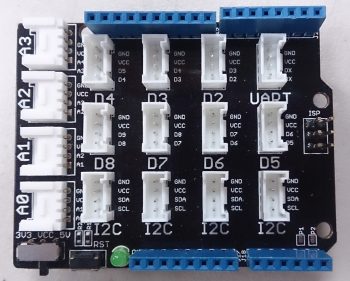
圖2 將溫濕度感測器裝在A0 的Grove 接頭。
如果您自行購買DHT11 感測器的話, 請將左側1 號腳位接5V ,2 號腳位串聯一個4.7KΩ 電阻之後接到LinkIt ONE 的數位腳位, 如圖2 的D6 腳位。請注意, 使用獨立的DHT模組時需連接到開發板的數位腳位,但使用Grove 溫濕度感測模組則是連到類比腳位,例如本範例的A0。這是兩者的主要差異所在。
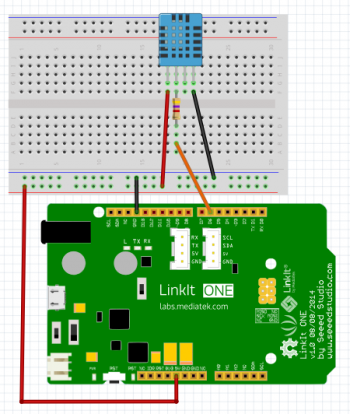
圖3 連接DHT11 與開發板。
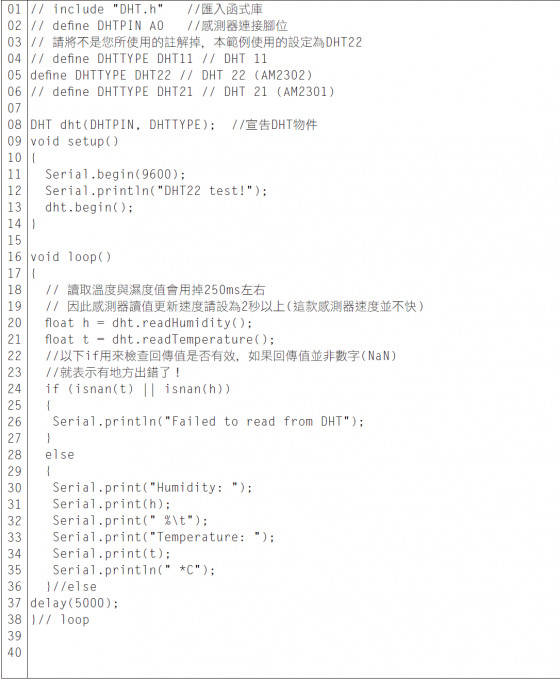
表1 溫濕度感測器範例
單機版程式
本範例首先要透過MCS 來切換一個連接到繼電器模組的家電裝置(例如檯燈或風扇)。在此需要一個Data Channel , 請依照表2 的說明新增Data Channel ,完成如圖3。
以下是重要程式解說:
• 宣告DHT類型
06 行的語法代表我們要使用的溫濕
度感測模組為DHT22 , 請根據您所
使用的模組來修改此處。

• 宣告DHT物件
程式中必須先宣告一個DHT 物件才能進行後續的讀取感測器值操作,由以下指令可以看到我們宣告了一個名為DHT 的dht 物件,同時要指定連接腳位DHTPIN , 也就是03 行的A0 ,以及指定DHTTYPE。

• 讀取溫度與濕度
宣告之後,就可以透過以下語法來分別讀取濕度與溫度,由以下指令可看到回傳值為浮點數。

• 錯誤檢查
使用if 搭配 isnan 語法來檢查t 與h 是否有效,如果並非數字就表示有地方出錯, 會在Serial Monitor 顯示
錯誤訊息。
• 顯示於Serial Monitor
如果一切OK 的話,就透過Serial.print(h); 與Serial.print(t); 在Serial Monitor 顯示濕度與溫度。請注意在39 行,我們使用delay(5000); 讓程式每5 秒鐘循環一次,畢竟溫度與濕度不會在短時間大幅度變化,因此不需要頻繁更新。
操作
執行時, 將可在Arduino IDE 的Serial Monitor 視窗中看到溫度與濕度的變化(圖4),在此為每5 秒鐘更新一次,因為這兩個物理量不會變化太快。您可以對它用嘴呵氣,或用手指輕輕捏住感測器本體,來看看濕度與溫度的變化。
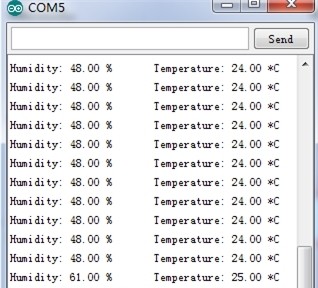
圖4 顯示溫度與濕度資訊於Serial Monitor 。
本期介紹了如何讓LinkIt ONE 開發板藉由Grove 溫濕度感測器模組來讀取環境中的溫濕度變化,下一期將會把這些資料上傳到MCS 雲服務, 期待您與我們一起動手製作有趣的物聯網專題。
參考資料:
Seeed Studio 溫濕度感測器函式庫與範例程式載點:
https://github.com/Seeed-Studio/
MediaTek Labs
http://labs.mediatek.com
Seeed Studio Wiki
http://www.seeedstudio.com/wiki/LinkIt_ONE
CAVEDU LinkIt ONE 教學
http://blog.cavedu.com 搜尋linkit
文章原文刊載於《ROBOCON》國際中文版2016/5月號