


月球,距離我們最近的星體,也是人類離開地球、邁向太空的第一站。長久以來,不管是月球表面的探勘照片、還是太空人登陸月球的錄影畫面,似乎都暗示著:月球是乾燥的不毛之地,不適人居:沒有變形金剛的太空船、也沒有嫦娥或月兔。
最近幾年,我們對月球的認識有了長足進展,越來越多證據表明,月球上不但有水,甚至出現在意想不到的地方,對人類未來的月面活動帶來潛在幫助。
不妨想像:未來人類在月球建立前哨站,駐紮於當地的人員,一切生活所需都有賴地球補給;唯一的例外,可能就是靠挖土取水——這不是掘井,而是要擷取月球土壤內的稀少水分…
月球,全然乾燥之地
打從 1969 年人類首度登陸月球以來,科學家針對帶回地球的月球土壤/岩石樣本,已進行過多次分析,並從中發現諸多元素╱化合物存在的堅實證據——但並不包括水;科學家推測,約莫 45 億年前,原始地球曾與大小接近火星的天體碰撞,產生的物質碎屑環繞地球並逐漸合併,最終形成月球。因為撞擊的龐大能量之故,月球剛形成時,表面覆蓋著岩漿海洋,水和其他高揮發性物質則散逸殆盡——稱為大碰撞假說 (Giant impact hypothesis)。
數十年來,一切跡象在在顯示,月球是個缺水的地方,除了 1976 年,蘇聯的月球 24 號 (Luna 24) 探測器,於月球地底 2 公尺深處,獲取的 170.1 公克土壤之外——蘇聯科學家於 1978 年的論文聲稱,從中發現水的存在。只是,既然美國科學家從未在月球土壤裡發現過水,蘇聯科學家也無法保證樣本絕未受到地球環境污染,這件事就這麼不了了之,沒有被認真看待。
月球,有點乾燥又沒那麼乾燥之地
學界對月球的認知開始改變,是在 2008 年,科學家利用更先進的技術,重新分析早前美國從月球帶回來的火山玻璃岩石樣本,確認了水的微量存在;隔年,印度首個月球探測器錢德拉揚 1 號 (Chandrayaan-1),也發現月球表面疑似存在水分子。
在那之後,有不少月面觀測或者岩石分析陸續得到類似結論,但都不能說是確切證據——主要原因在,各種不同月面觀測看到的訊號,或許來自羥基 (OH),而非水分子 (H2O), 不然就是還有其他解釋;再者,亦有研究顯示,岩石樣本裡發現的水,可能只是少部分特例,而非普遍現象——換言之,月球整體而言還是極度乾燥。
月球隕石坑存在水冰
到了 2018 年,美國的研究團隊詳細分析以前錢德拉揚 1 號上、由月球礦物測繪儀 (Moon Mineralogy Mapper) 得到的近紅外線反射光譜數據,確認月球南北極附近、隕石坑內的永久陰影區域(即太陽光永遠照射不到的區域)覆蓋著冰——這可算是月球表面存在冰的第一個直接證據。
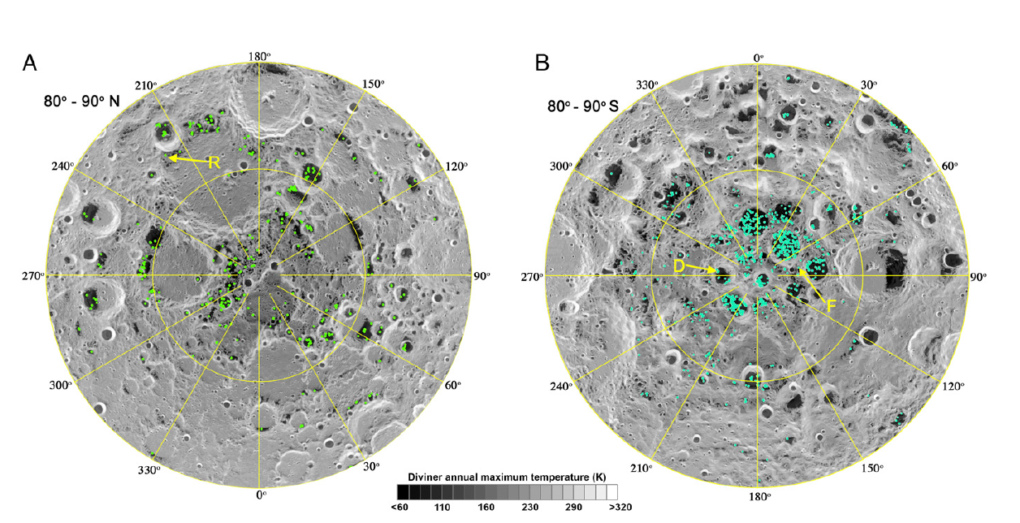
只不過,在這些隕石坑的永久陰影地帶,冰覆蓋的比例不但很低,還混雜了大量塵土,相當不尋常。數年前,科學家相繼在水星和穀神星(Ceres,位於火星和木星軌道之間主小行星帶的天體)的隕石坑永久陰影區域發現冰,而且豐富度和純度都比月球的冰高上許多——這樣的結果顯示,月球上的水,起源或演化可能跟水星和穀神星的水很不一樣;若能明白兩者差異的來由,將幫助我們更加理解月球的歷史。
月球的冰如何演變?
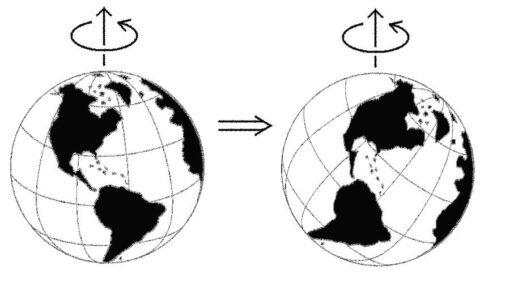
雖然科學家目前還未能完全解釋月球的水文,但有人猜測,早期月球曾擁有溫暖、潮濕的大氣,現在的水是當時的殘留,經過時間的流逝,逐漸擴散、消失,演變成現今的樣貌。另外一種可能,則是因為月球的真極移(true polar wander,即星球自轉軸的位置變化造成地理南北極極點的移動)現象,長久下來造成隕石坑內的陽光曝曬不均,所以永久陰影區內的冰才會分布零散、不規則。
還有個問題是,上述研究使用的近紅外線反射光譜法,只能告訴我們月球表面的狀況,無法顯示地面以下的冰層分布;所以,這些位於隕石坑永久陰影區域的冰,究竟有多少?只是表面薄薄一層呢?還是像冰山一樣,有大量的冰埋藏在地底深處?這都有待之後,利用其他觀測方法進行分析,或甚至直接獲取月球地底的土壤樣本,才會知道了。
紅外線天文觀測神器——平流層紅外線天文台
另一方面,要研究月球上的水,其實在地球也能進行,不一定要將探測器送往月球;美國國家航空暨太空總署 (National Aeronautics and Space Administration,NASA) 和德國航空太空中心 (Deutsches Zentrum für Luft- und Raumfahrt e.V.,DLR) 的聯合計畫,由 1995 年退役的大型商用飛機波音 747SP 改裝而成、主鏡口徑達 2.7 公尺的反射望遠鏡——平流層紅外線天文台 (Stratospheric Observatory for Infrared Astronomy,SOFIA),就對月表水分子的觀測做出重要貢獻。

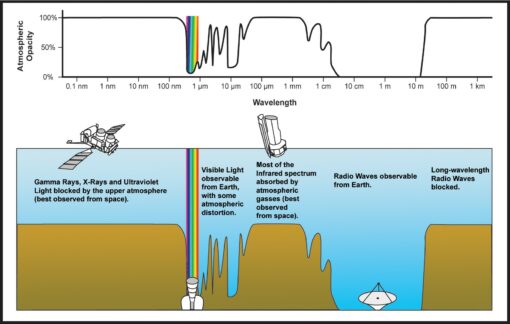
一般而言,當星體發出的光線抵達地球時,會跟大氣層中的物質分子或粒子作用,造成很大一部份的電磁能量被吸收或反射;而地表上空無處不在的水氣,正好是很強的紅外線吸收氣體。因此,以紅外線為目標的天文觀測,非常難以在地面進行。
基於上述原因,平流層紅外線天文台的最大特點,就是在夜間於 13 公里高空飛行,位處大氣層 99.8% 的水氣之上——這讓科學家不需要依賴太空望遠鏡,也能避免水氣干擾、進行靈敏的紅外線天文觀測;同時,平流層紅外線天文台的高機動性也是一大優點:它能夠飛往地球上的任意角落,全方位觀測夜空,不像傳統地面望遠鏡受到位置限制。
月球上的水不只冰
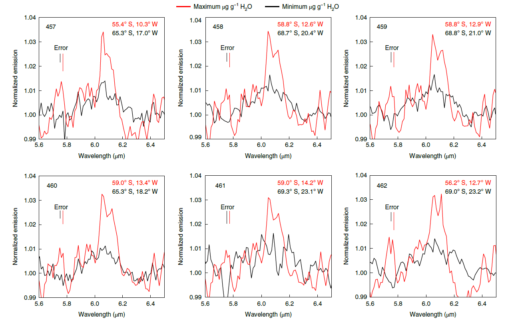
2018 年 8 月 31 日晚上,時為夏威夷大學馬諾阿分校 (University of Hawaiʻi at Mānoa) 博士生的霍尼博爾 (Casey I. Honniball),和研究團隊成員利用平流層紅外線天文台,對月亮南半球的中高緯度地區、克拉維斯環形山 (Clavius) 一帶,進行了十分鐘觀測,這也是平流層紅外線天文台第一次被用來瞄準月球。沒想到,這次半試驗性質的觀測,帶來出乎意料的驚喜。
天文台接收到強烈的紅外線訊號,波長六微米(百萬分之六公尺)。合理推測,這是月球表面的特定物質受陽光照射後,又將吸收到的輻射能量釋放出來所致。這個結果,作為霍尼博爾博士論文的一部分,於 2020 年 10 月發表在《自然.天文學》 (Nature Astronomy) 期刊網站。
究竟是什麼物質能夠放出波長六微米的紅外線呢?研究團隊表示:「除了水之外,我們並不知道任何月球上合理存在的其他物質,會展現出單一的六微米(波長)光譜特徵。」
過往,針對月球水的研究,很大一部份重心都放在隕石坑的永久陰影區——畢竟那裡溫度最低,也是最有可能存在水冰的地方。儘管也有跡象顯示,陽光照射的月面區域,似乎存在著水 (H2O) 或羥基 (OH),但一直沒有證據確認何者為是。這次的研究,不但證實以前探測器看到的訊號為水,也表明了,水不只存在月球隕石坑的永久陰影區,甚至可能以冰之外的形式,出現在陽光普照的月面大地。
月球的水知多少?
那麼,缺少了隕石坑的陰影保護,這些水又是如何得以保存、不會散失呢?研究團隊認為,水分子極可能是儲存在自然產生的火山玻璃中,或是被夾在岩石粉塵的微小結晶之間――兩者都能隔絕月球表面的極端溫度變化(約絕對溫標 95K~390K),和接近真空的環境。
根據觀測結果,每立方公尺的月球土壤,含有數百公克的水——看起來不少,但其實只有地球撒哈拉沙漠土壤含水量的百分之一;研究團隊同時表示,這可能只是區域性的地質現象,而非整個月球的一般性結果。
接下來,還需要仔細在月球表面做大範圍觀測,研究水含量隨時間和緯度的變化——這將幫助我們明白這些水的生成和儲存,以及在月表的分布狀況。
未來展望
如果我們對月球的水資源,包括其型態、集中度、分布位置、豐富度等等瞭解越多,未來就越可能妥善運用它。這些水不但能夠作為未來月球前哨站的人員所需,甚至也能還原成氫和氧,製造可呼吸的氧氣,或者成為火箭燃料。幸運的話,或許我們不用到偏遠的隕石坑永久陰影區,冒險採取冰塊;只需要在陽光照耀之下挖掘土壤,就能得到足夠使用的水;從地球過去的補給也可以省下裝水的空間,以放置研究儀器。
無論如何,目前最重要的事,就是持續探索未知:除了遠距測量之外,也需要月球的登陸任務,以驗證許多研究推論。NASA 現在的阿提米絲 (Artemis) 計畫,打算於 2024 年重返月球,屆時也預期會產生第一位登陸月球的女性太空人。一切順利的話,2028 年將會有月表的長期任務;而我們在月球學習到的經驗,都將作為宏偉的下一步——人類登陸火星的養分。
參考資料
- Leonard David (2020/10/26), “Water Found in Sunlight and Shadow on the Moon”, Scientific American.
- Leonard David (2018/08/21), “Beyond the Shadow of a Doubt, Water Ice Exists on the Moon”, Scientific American.
- Kimberly Ennico et al. (2018), “An Overview of the Stratospheric Observatory for Infrared Astronomy Since Full Operation Capability”, J. Astron. Instrum. 7, 4, 1840012.
- E. T. Young et al. (2012), “Early Science with SOFIA, the Stratospheric Observatory for Infrared Astronomy”, ApJL 749, L17.
- Shuai Li et al. (2018), “Direct evidence of surface exposed water ice in the lunar polar regions”, PNAS September 4, 115, 36, 8907.
- Alberto E. Saal et al. (2008), ”Volatile content of lunar volcanic glasses and the presence of water in the Moon’s interior“, Nature 454, 192.
- C. M. Pieters et al. (2009), “Character and Spatial Distribution of OH/H2O on the Surface of the Moon Seen by M3 on Chandrayaan-1”, Science 326, 5952, 568.
- Arlin Crotts (2011), “Water on The Moon, I. Historical Overview”, Astronomical Review 6, 7, 4.
- C. I. Honniball et al. (2021), “Molecular water detected on the sunlit Moon by SOFIA”, Nature Astronomy 5, 121.
- NASA (2020/10/26), “NASA’s SOFIA Discovers Water on Sunlit Surface of Moon”.
- Humboldt State University, “Atmospheric Absorption & Transmission”, Introduction to Remote Sensing.
- Simon J. Lock and Sarah T. Stewart (2019/07/01),〈浴火而生-改寫月球起源〉,科學人。







































{kind=link}