



本文由双喜電影贊助,泛科學企劃執行
「這部片講的不是未來,而是未來的一種可能性。這個故事不一定是我們想像中會發生的未來,更不是什麼預知電影,而是講述人類若是繼續探索太空和殖民月球、火星、甚至其他星球會發生什麼情況。」——《星際救援》編劇格羅斯(Paul Michael Gross)

在未來的幾十年,人類會如何朝太空發展呢?這問題一定在很多科學家、工程師和太空迷的心頭上打轉。仔細一想,玩法還真不少呢!
你想要以商業為優先,開發太空運載、旅遊、採礦嗎?
還是想以「尋找智慧生命」這個遠大的使命為目標?
又或是想坐地球望月球、坐月球望火星,慢慢地拓展人類居住的版圖呢?
這些願望都有可能在未來的太空探索當中被實現呢!而在近期上映的電影《星際救援》中,便對未來幾十年內的太空探索做了另一種解釋:既科幻又夢幻,而且還不失真實喔~
懼高症注意!這個高聳入太空的建築到底是什麼?
在《星際救援》預告中最讓人印象深刻、最標誌、最能夠標誌這是什麼神奇時代的景物:不是月球基地、不是太空船,而是那個謎樣的高聳建築物。在這個商業太空之旅已經不是夢的時代,這到底是什麼黑科技呢?
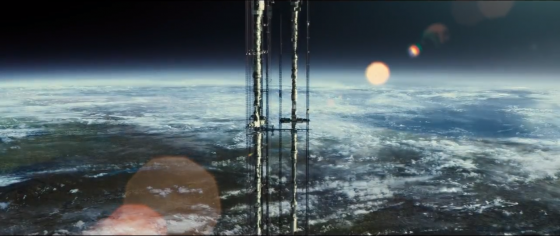
沒錯!這其實就是你我都不陌生的太空電梯。在《星際救援》中,我們可以很難得的看到這個很常被提及、但是實際執行仍有困難的黑科技,以特效的方式出現在大家眼前;而且它還是主角的工作場所呢!
其實太空電梯的發想,早在1895年就已經出現了。俄羅斯著名科學家康斯坦丁.齊奧爾科夫斯基(Konstantin Tsiolkovsky)是第一位提出類似概念的人。其最原始的構想是在地球同步軌道上建造一個「城堡」,與地球上一座像巴黎鐵塔的建築彼此相連。
之後在1960年,另一位俄羅斯著名工程師尤里.阿特蘇塔諾夫(Yuri Artsutanov)有了更接近現代太空電梯的想法:認為太空電梯應該要從太空船開始由上(太空)往下(地表)修建,顛覆了許多人的想像。這個方向雖然後續還是有些許討論,但還是沒有太多的關注與研究;一直到1975年美國空軍的研究機構將這個概念納入報告中後,才開始有了各種材料的發想與科幻想像。
而後在1978年,英國的小說家阿瑟.克拉克(Arthur C. Clarke,如果你覺得他有點陌生,只要知道他也是《2001太空漫遊》的作者就對了。)的科幻小說《天堂的噴泉 Fountains of Paradise》中,最接近現代的太空電梯的雛形才出現。故事的設定是,未來的工程師們在斯里蘭卡某處的高山上用奈米碳管打造了了延伸到3萬6千公里的高空的太空電梯,以此取代了太空船。
等等,這個高度也太實際了吧!為什麼太空電梯標高要3萬6千公里呢?這可是太空電梯不會垮下來的重要關鍵喔!!
太空電梯為何一定要在3萬6千公里?
簡化的描述太空電梯,它就是一個從地表延伸到太空的長長纜繩、加上電梯和其他像是實驗室等的設備;但這可不是能隨隨便便蓋到某個高度想喊停就喊停的喔!

太空電梯整個設備的質心,一定要在地球靜止軌道上:也就是離地3萬5786公里的地方。
地球靜止軌道有個特點:在軌道上衛星的運行方向和地球自轉方向一致,繞行地球運行一周的時間也和地球自轉周期相同。因此從地球人的角度來看,這上面的東西都是靜止不動的;如果太空電梯的質心不在這個軌道上,就會受到地球自轉和重力的影響,可能會因此而倒塌或支解。
目前科學家腦海中的計畫大概長得像這樣:以50公里高的高塔在地球上作為基底,最好位處在赤道地區:除了地球靜止軌道就在赤道正上方之外,如此高聳的建築更要避開強風,而在赤道地區的話就不會有熱帶性低氣壓的肆虐。然後要有一顆位於同步軌道的衛星,降下具有超級延展性和強韌度的纜繩,同時作為機房設備;並且要在整個電梯的另外一端(超過地球靜止軌道的相反端)加上平衡的力學原理的機制。
這樣看起來,太空電梯的結構就像鏈球那樣,只是繩子中間多了好幾個上下跑的磁浮盒子,並且在不同的高度停下來,提供不同的服務,例如運送人力物力來往地球和太空之間,維修、部屬衛星可能也會變得很方便。

不過商用太空飛行不都已經能實現了嗎?還需要蓋太空電梯嗎?與火箭相比,太空電梯的運輸成本較為低廉:NASA估算使用太空電梯把貨物從地球表面送到軌道上,每一公斤只需要花費1.5塊美金;這樣換算下來,運送一個帶著行李的旅客成本可能只需要不到100美金。相較之下,現在的獵鷹9號火箭要載1公斤還是需要大概1700美金的成本。
但既使概念和誘因都有了,也不代表太空電梯的實現就近了。想建造太空電梯,還有很多的難關要克服:第一個就是纜繩,這也是推動現在奈米技術、石磨稀等材料科學前進的動力之一,因為我們需要超高強度和延展性的材料;再來我們不只安裝纜繩,還要能夠像電梯一樣有效的操控它;除此之外地表上的高塔結構可能需要比現在任何建築都還要高,才能提供必要的防護和支援。最後,還有一個最最最重要的難關要克服:就是我們為什麼要建造並使用這個太空電梯的動機。畢竟誰都不想花好大一筆錢打造一個沒有人想用的設備,變成蚊子館對吧~
《星際救援》所在的,是個超越月球和火星的時代
太空電梯要出現在大家面前,除了技術之外,需要滿足一個非常商業的條件:有大量需求、有明確使用目的,這些目的可能包括需要頻繁的更換衛星零件、運載貨物和人員往返太空和其他有人類居住的地方、直接在太空中開始太空旅行、監測更遙遠的宇宙⋯⋯之類的。簡單的說,它必須要跟我們現在使用電梯那樣地頻繁,打造太空電梯才能值回票價。
那麼有著太空電梯這樣高科技產物的《星際救援》,究竟身處在怎樣的時代呢?最簡單的猜測,它可能是在人類開始長居月球、火星之後。

如果NASA和其他各國際計畫沒有延宕的話,我們最快可以在2025年左右看到人類重返月球,在2035年左右看到人類踏上火星。在這之間可能又會有更多的中繼太空站產生,接下來10~20年內,人類開始習慣在宇宙中來去,太空居民開始出現,資源開始互通⋯⋯
假如說有一天,你發現需要更快速的方式從月球基地前往地球表面探望自己的家人,或是從地球前往地球軌道開一場重要的會議,這時候就是太空電梯登場的時候了。相信在這個時間點技術應該已經可以解決各種問題了,對吧?
《星際救援》就是一個在這樣時空背景誕生的世界,比現階段殖民月球和火星更之後的世界。在這個時代,土生土長的火星人可能稀鬆平常;月球雖受制於太空法不被任何人擁有,但也是海盜橫行之地;前往遙遠的深空尋找生命也已經可能發生,但是人類又能撐過整趟旅程嗎?這些問題,都令人充滿遐想呢~
R編空想病吐槽發作:
預告片中卻有一個讓我很納悶的地方⋯⋯就是當主角從太空電梯上因爆炸摔下來這個過程。這也掉得太乾脆了吧!
如果大家好奇的話可以想想,當你從離地300多公里的國際太空站上「掉」下來,你需要大概2.5小時才能著地;而且你也不會是垂直向下掉,而是會伴隨著國際太空站本身的速度進入軌道,再一點一點的接近地球。
但是預告中我們看到主角非常直接像跳樓一樣摔下來了,所以他離地也沒有很遠是嗎?但又是怎麼看到那麼美麗的地球弧線呢?這我也很好奇啊~

參考資料:





























