


「數感盃青少年寫作競賽」提供國中、高中職學生在培養數學素養後,一個絕佳的發揮舞台。本競賽鼓勵學生跨領域學習,運用數學知識,培養及展現邏輯思考與文字撰寫的能力,盼提升臺灣青少年科普寫作的風氣以及對數學的興趣。
本文為 2019數感盃青少年寫作競賽 / 國中組專題報導類第一名 之作品,為盡量完整呈現學生之作品樣貌,本文除首圖及標點符號、錯字之外並未進行其他大幅度編修。
- 作者:林柏廷/台北市私立復興實驗高級中學

一、研究動機
從小,我就幻想著能夠開著一台酷炫的法拉利快速行駛在路上,帥氣地飆車和甩尾。想必每個人也都想像過自己在車道上疾速奔馳吧!如果又能夠像頭文字D的主角藤原拓海一樣,把車開得又快又穩,不知道該有多帥!
二、研究背景簡介
在頭文字D裡,為了要訓練拓海的駕駛能力,他的父親曾在車上裝了一杯水,且要求他不能將杯子裡的水灑出來,否則就不能回家。最終,拓海練成了一身絕技,車子開得又快又穩,彷彿人車合一,就此成為了新一代的秋名山車神。不過這真的有可能嗎?我們真的能夠高速行駛且不讓水灑出來嗎?
三、研究過程
首先,我們觀察一些生活中類似的情況。為什麼我們在拿著一杯盛滿的水走路時,水會灑出來呢?因為慣性!我們人前進了,但是水會因為慣性還留在原地,所以水就灑出來了。不過如果用假想力來看,在一個非慣性坐標系當中,如果人用一個a的加速度走路,那水杯裡質量為m的水就會受到-ma的假想力(負號是因為假想力的方向與加速度的方向相反)。如果轉彎的話,這個力就叫離心力。這就像有人在杯子裡使用-ma的力推這杯水,讓水灑出來(當然,杯子裡沒有真的躲著人,因為假想力顧名思義就是一個假想的力)。
如(圖一),電影中杯子裡的水並不是盛滿的,水面到杯緣有一定的深度。

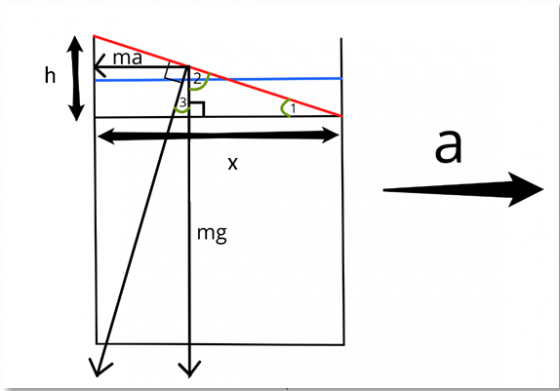
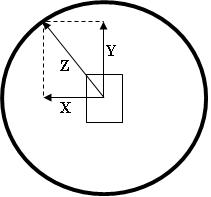
如(圖二)所示,我們試著畫圖計算估計這杯水在拓海轉彎時的運動情形。藍線為水在杯裡的高度;紅線為轉彎時的水面,可以看到水面是傾斜的。圖中標示了杯口的直徑 x 和轉彎水面最低點到杯口的距離 h。以非慣性坐標系來看,車裡的水受到了向下 mg 的重力和 -ma 的假想力,合力方向也呈現在圖中。合力方向就是車子裡新的重力場方向,所以水面會大約垂直這個合加速度的方向。
如(圖三):

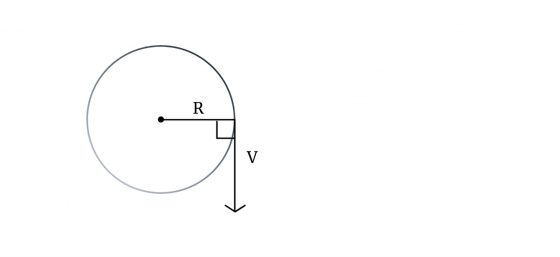
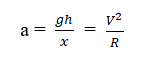
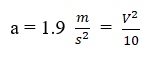
透過相似三角形,我們證出 x : h = mg: m│a│。即,a 的大小等於 gh/x 。我們知道車子在轉彎時,若曲率半徑為R,切線速度為 V,向心加速度為 V2/R。如(圖四)所示:
我們依上述公式可做出下列統整:
 四、實證分析
四、實證分析
 四、實證分析
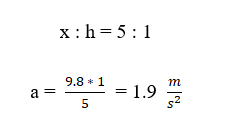
四、實證分析有一般化公式後,我們只需要代入數字,便可求出拓海在轉彎時不讓水灑出來的加速度。從(圖一)電影裡的水杯特寫當中,我們觀察到水杯直徑 x 和水面最低點到杯口的距離 h 比大約為 5:1,即:
此時再找出轉彎的曲率半徑,就可以找到拓海開車的時速囉!如(圖五)所示,曲率半徑就是 AE86 車身長的一半加上護欄圍繞住轉彎處所形成的局部近似圓半徑。

上網查詢資料後,我們得知 AE86 車身長約為 4.2 公尺,質量中心大約在車身長一半處,也就是 2 公尺的位置。求出局部近似圓半徑的方法如下:
如(圖六)所示,到 google maps 尋找秋名山髮夾彎的道路,將螢幕截圖後利用小畫家點出其圓上相異四點,再透過弦的垂直平分線找出圓心。點出圓心後,利用 google maps 測量距離求出圓半徑。
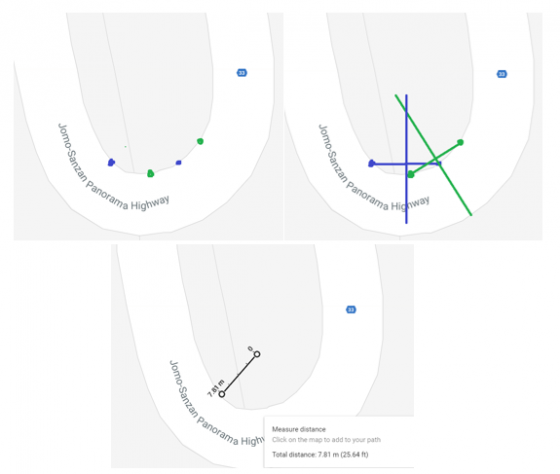
透過 google maps 和小畫家,我們找出了局部近似圓的半徑,約為 8 公尺。將其數字和車身長度 2 公尺相加,我們就得到了長度約為 10 公尺的曲率半徑。這時,再沿用之前推論的加速度,代入向心加速度公式中:
求出拓海的行駛速度v為 √19 m/s,大約是每秒 4.4 公尺。
4.4 * 60 * 60 / 1000 = 15.84
換算成時速大約是 16 km/hr。
這速度其實是十分緩慢的,到底有多慢呢?舉個例子做對比:一般國中生跑 100 公尺的時間大概都在 20 秒以內,也就是說 1 秒內大約都能跑 5 公尺。
欸?拓海開車的速度竟然比我們國中生奔跑還要慢!拓海恐怕真的會被對手嗆說:「我跑步就比你快了!」,這樣,秋名山車神的面子怎麼掛得住?那麼,想必大家應該很好奇,如果要漫畫裡快速行駛又不讓水灑出來的情境呈現於現實生活當中,需要一個多大的杯子?一樣的,我們只需要代入想要的時速,做簡單的換算之後就可以算出來啦!
我們估計拓海賽車的時速會超過 150 km/hr。若以時速 162公里計算,換算成秒速是 45 m/s,那麼我們就可以透過下述的算式求出車子的向心加速度:
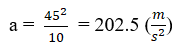
這加速度大約是重力加速度 g 的 20 倍。也就是說,這杯子裡水面到杯口的距離,根據相似三角形,必須要是 5 公分的 20 倍,也就是 100 公分。拓海至少要使用一個超過 1 公尺深的杯子才能在時速 162 km/hr 的情況下開車又不讓水灑出來。
五、結論探討
利用相似三角形和電影中水杯特寫的比例,我們求出了拓海轉彎的加速度;利用向心加速度公式、google maps、和小畫家,我們求出了拓海的行駛速度,最後得到的結果為:若依照電影情節,拓海的行駛速度大約要低於 16 km/hr 才可避免水灑出來;若要以時速 162 公里的速度開車,就需要一個高於 1 公尺的杯子。顯然我們很難找到一個 1 公尺高的杯子直立在車裡。這是一件非常不合理的事。這樣的話,拓海估計永遠回不了家了,除非他買了一個如(圖八)的巨大杯子。































 本文出自
本文出自
{kind=link}
{kind=link}