機器人有意識嗎?
想知道為何真正的自動機器人還沒有出現,最清楚的方式是看它們的意識屬於那個階層。我們在第二章說過,可以把意識分成四個階層。階層「0」能用來描述恆溫器或是植物,它們有一些回饋迴路,受到一些簡單參數影響,例如溫度和陽光。昆蟲和爬行動物具有階層「1」意識,這些生物能移動,同時有中樞神經系統,能把「空間」這個新的參數納入自身所處的世界模型中。接下來的階層「2」意識,這個階層的世界模型中納入與其他同種個體的互動,因此需要情緒。最後人類擁有階層「3」意識,其中包括時間和自我意識,好用來模擬事物未來演變的方式,並且決定自身在這些模型中的處境。
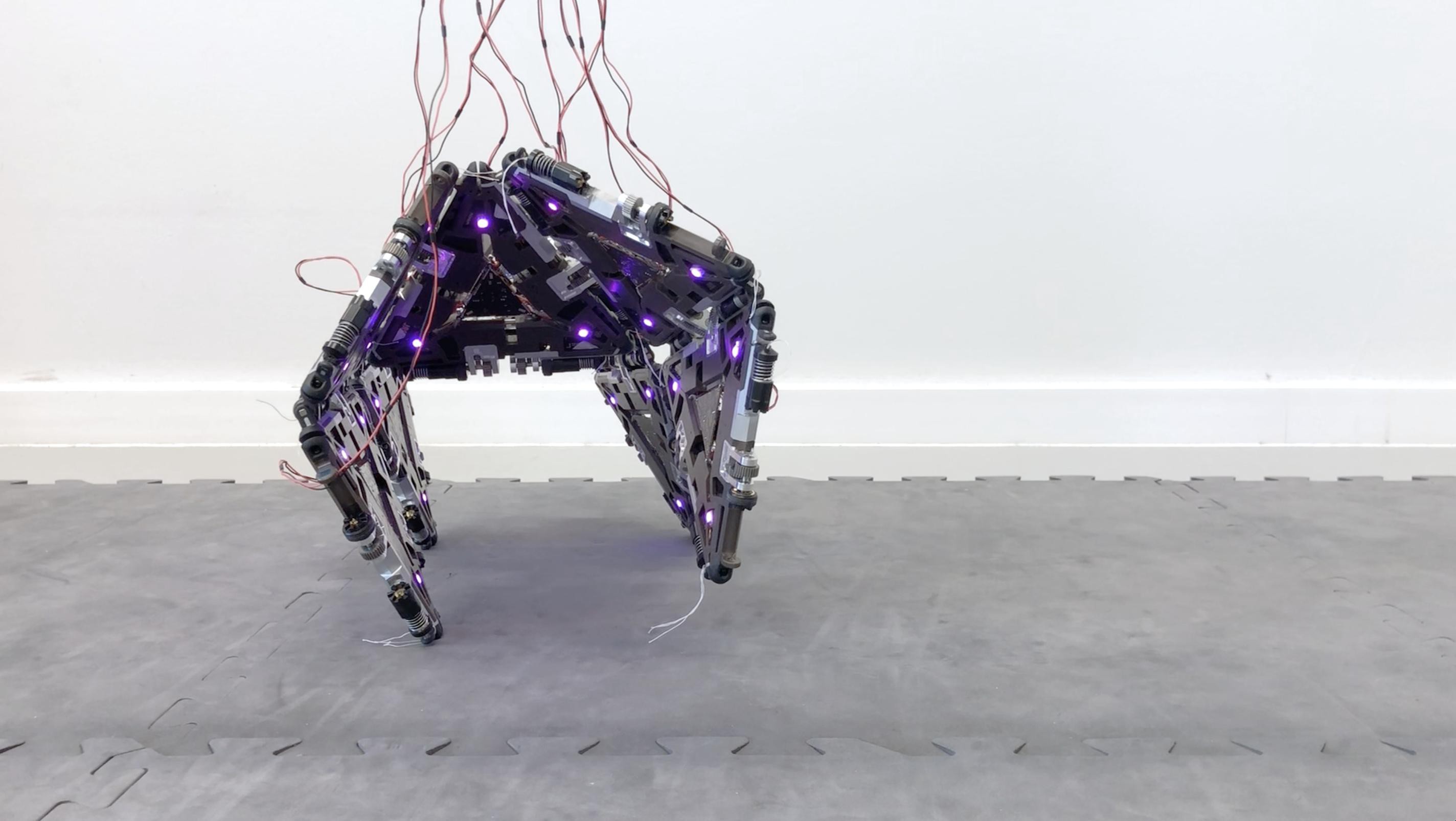
根據這個理論,我們可以給現今的機器人排位置。第一代機器人是階層「0」,因為它們不會動,沒有輪子也不能走動。現在的機器人位於階層「1」,它們可以動,但是要在真實的世界中暢行無阻還有很多困難,因此處於非常低階。這些機器人的意識可能和蠕蟲或是移動緩慢的昆蟲相同,若要製造出真正的階層「1」意識,科學家製造出的機器人就要有如昆蟲和爬行動物的意識。就算是昆蟲,也具有現在機器人所缺乏的能力,例如能快速找地方躲起來、在森林中找到交配對象、察覺掠食者而逃開,以及找尋食物與棲所。
之前提過,我們可以依照回饋迴路的數量把各階層的意識再細分。例如有眼睛的機器人就有多個迴路,因為這種感測器能偵測三度空間的影子、邊緣、曲線和幾何形狀。如果有耳朵,機器人便能偵測頻率、音量、聲壓和聲音的休止。這樣回饋迴路加起來大約有十個。(昆蟲因為要在自然環境中找尋食物、伴侶和棲所,因此回饋迴路可能有五十個以上)。因此,典型的機器人意識為階層「1:10」。
接下來,如果機器人具有階層「2」意識,它們所建立的世界模型就要能納入其他個體。我們之前說過,在階層「2」意識中,第一個計算值是群體中的個體數量乘上每個個體具有的情緒種類,和彼此溝通的表現方式數量。因此機器人可能具有階層「2:0」意識,不過現今的實驗室必須先製造出具有情緒的機器人。
現在機器人所見到的人類,只是從攝影機捕捉到的像素,不過有些人工智慧的研究人員開始打造能經由表情和聲調來辨認情緒的機器人。這是機器人了解人類的第一步:人類不只是隨機排列的像素,而是具有情緒狀態。
在接下來幾十年,機器人將會慢慢在階層「2」中爬升,開始具有小鼠、大鼠、兔子、狗的智能,然後是貓。在本世紀末期,機器人可能具有猴子的智能,開始會產生自己的意識。一旦機器人具有從普通常識而來的應用知識,並且具有心智,就能對未來作出複雜的模擬,而且以自己擔任主要角色,這時便擁有階層「3」意識。它們會離開「現在」的世界,而進入「未來」的世界。對於現在的機器人來說,這還是好幾十年以後的事情。要模擬未來,意味著必須清楚掌握自然定律、因果關係和普通常識,這樣才能考慮未來的事情。這也意味著要了解人類的意圖與動機,才能預測他們未來的行動之前也提過,階層「3」意識的數值,是由個體在模擬未來各種真實情況時,所使用的因果連結數量,除以對照組的數量而得到的。現在的電腦能靠幾個參數模擬有限的狀況(例如兩個星系的碰撞,飛機周圍空氣的流動、建築物在地震時搖動的方式),但是還無法模擬未來複雜的狀況,因此它們的意識可能像是階層「3:5」。
因此我們需要花很多年工夫,才能製作出能展現人類社會中普通功能的機器人。
速度是障礙
機器人何時才能具有人類的智能,甚至超越人類呢?沒人知道,但是有許多人預測,其中大部分人的依據是摩爾定律,將之推廣到數十年後。但是摩爾定律並非真正的定律,因為它違背基本的物理定律:量子理論。所以摩爾定律無法永遠持續下去,而且我們現在已經看到速度減緩了。在十年或二十年內,速度的增加會平緩下來,結果會很可怕,特別是對電腦資訊產業。
目前可以在指甲大小的晶片上放入數百萬個電晶體,但是能在這些晶片上放入的電晶體數量有限。奔騰晶片中最薄的一層只有二十個原子厚,但是到了二○二○年可能只有五個原子厚。接下來海森堡(Werner Heisenberg)的測不準原理(uncertainty principle)效應就會越來越明顯,你將無法確定電子的位置,電子可能從線路中漏出來,晶片會短路。(附錄會詳細討論量子理論和測不準原理。)此外,晶片發出的熱足以在上面煎蛋。除非找到替代方案,漏電和發熱的問題最後會讓摩爾定律的速度慢下來。
以二維晶片上容納電晶體的方式,計算能力已經到了極限,因此英特爾公司花費數十億美元,未來將放在三維晶片上。時間會說明這樣的賭注能否回本。(三維晶片的主要問題之一是晶片越高,產熱的__速度也越快。)微軟則採用其他方式,例如用二維晶片進行平行處理。其中一種可能的方式是把晶片水平排成一列,然後把一個軟體問題分成好幾部分,每個部分分給一個晶片,最後再集合起來。但是這個過程並不容易,而且軟體發展的速度要比我們習慣的超快速摩爾定律慢許多。
這些權宜之計可能讓摩爾定律再撐幾年,但是最後這些伎倆都有盡頭,都逃不過量子理論的掌控。因此矽晶片電腦的時代終將結束,科學家正在實驗各種不同形式的電腦,例如量子電腦、分子電腦、奈米電腦、DNA電腦、光學電腦,不過目前這些技術沒有一個可以運用。
詭異之谷
我們先假設有一天真的發展出難以置信的複雜機器人,晶片上的電晶體可能是分子而不是矽。這時,我們要這些機器人和人類多像呢?在製造類似萌寵物和小孩的機器方面,目前日本居於領先地位,但是這些設計師很小心,不要讓機器人太像人類,不然會讓人怕怕的。這種現像是日本的森政弘博士在一九七○年首先研究的,他稱之為「詭異之谷」:如果機器人太像人類,反而會恐怖。(這個效應最早是一八三九年達爾文在《小獵犬號航海記》提出的,後來佛洛伊德於一九一九年有篇文章標題就叫做〈詭異〉。)從那時起,不只人工智慧研究者,連動畫師、廣告主,以及其他要推銷人形產品的人,都仔細研究這個理論。例如CNN評論動畫電影《北極特快車》時,說:「片中出現的人類角色簡直是……嗯,讓人毛骨悚然。《北極特快車》說好聽是讓人不安,說難聽是有點驚悚。」
根據森政弘的說法,如果機器人越像人類,我們對機器人的同理心就越多(但只多到某個點),如果機器人有人類的外觀,同理心便會大幅減少,這就是「詭異之谷」。如果機器人的外表和人類非常相似,但是又有一些特徵不同,這便顯得「詭異」,讓人有嫌惡和恐懼之感。如果機器人外表和人類百分之百相同,和你我無法區分出來,這時我們又會恢復正面情緒。
這個理論有實用的意義,例如,機器人應該要微笑嗎?首先,機器人應該要微笑待人,讓我們覺得舒服。微笑是世界性表示友善與歡迎的方式,但是如果機器人的微笑太真實,反而會讓人起雞皮疙瘩。(例如萬聖節面具通常做成有惡魔面貌的食屍鬼咧嘴而笑。)機器人的微笑要有童顏(例如圓臉大眼),不然就非常像真人,不能在兩者之間。(故意微笑時,我們是用前額葉皮質控制面部肌肉,如果是發自內心的微笑,則是由邊緣系統所控制,兩者運用的肌肉組合有些差異。人類腦能區分這樣的差異,這有利於演化。)
這種效應也可以用腦部掃描來研究。我們把受試者送進磁振造影機器中,讓他看一個長得和人類一模一樣的機器人圖片,不過這個機器人的身體動作有些抽象,像是機器。腦不論看到任何東西,都會預測它未來的動作。不過當機器人的動作像是機器,就和外貌無法配合,這讓我們感覺不舒服。這時頂葉會格外活躍(特別是連結運動皮質和視覺皮質的部位)。目前科學家相信鏡像神經元(mirror neuron)存在於頂葉。這是有道理的,因為視覺皮質收到人模人樣的機器人影像,運動皮質和鏡像神經元會預測機器人的動作。最後,由眼睛後面的眼窩額葉皮質彙整所有訊息,然後說:「嗯,有些地方怪怪的。」
好萊塢的製片了解這個效應。他們花很多錢製作恐怖片,也了解巨大的妖魔或是人造的怪物從草叢中突然跳出來,並不是最恐怖的畫面,最恐怖的是發生在一般人身上的扭曲現象。想想電影《大法師》吧!是哪一幕讓觀眾嘔吐著跑出電影院或昏倒在椅子上呢?是惡魔出現的那一幕嗎?不,是琳達.布萊爾(Linda Blair,被惡魔附身的少女)把頭完全轉過來的場景,讓全世界的電影院爆發出刺耳的尖叫和震耳的哀鳴。
年輕猴子身上也有這種效應。如果你讓牠們看吸血鬼或是科學怪人的圖片,牠們只會嘻笑然後把圖片撕掉。如果你給牠們看的是被斬首的猴子,牠們會高聲尖叫。日常之物的扭曲,才會發出最大恐懼。(在第二章,我們用意識的時空理論解釋幽默的本質,因為腦會模擬笑話情節中的未來,但是讓人驚訝的笑點就突然出現。這個理論也可以解釋恐怖的本質。腦會模擬日常平凡的事物,但是這些事物如果突然往恐怖的方向扭曲,就會造成震撼。)
機器人將會持續有童顏的外貌,就算是有人類般智能之後也是如此。要等到機器人的動作完全像人類之後,設計師才會讓它們的外貌完全像是人類。
 本文摘自泛科學2015六月選書《2050科幻大成真:超能力、心智控制、人造記憶、遺忘藥丸、奈米機器人,即將改變我們的世界》,時報出版。
本文摘自泛科學2015六月選書《2050科幻大成真:超能力、心智控制、人造記憶、遺忘藥丸、奈米機器人,即將改變我們的世界》,時報出版。