




蜜月手、電腦手與媽媽手
臂神經叢出了腋下以後,會形成四條主要神經來到上肢:分別是肌皮神經、正中神經、橈神經以及尺神經。要找到這四條主要神經並不困難,問題是大體老師的手可能會有些彎曲,加上皮膚僵硬,手掌可能緊握等,使翻皮進度較慢,所以在實驗室經常看到學生努力在按摩大體老師的手部,好增加一點延展性。肌皮神經主要支配上臂屈肌,大家熟知的肱二頭肌即是其中之一。當我們在顯示自己肌肉發達時,經常比出像大力水手卜派的姿勢,在上臂鼓起的肌肉就是肱二頭肌,而這動作能完成,就是藉由肌皮神經的支配。
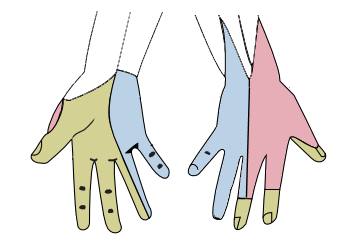
正中神經支配前臂大部分屈肌及手掌大拇指側的肌肉,掌管像是彎屈手腕及手指等動作;也負責手掌、大拇指、食指、中指及一半的無名指這三指半部位的皮膚感覺。
我們常聽到的「電腦手」、「腕隧道症候群」,就是正中神經受到壓迫造成的。之所以會稱為「腕隧道」,是因為當手掌朝上時,腕骨的排列是凹狀的,凹口兩端由橫腕韌帶圍住,看起來像是隧道一般的結構,所以叫做腕隧道。
我們彎屈手指的肌腱,包括正中神經及血管均通過腕隧道由前臂進到手掌,當這部分的結締組織因為過度使用或壓迫而發炎,就會腫脹增厚,擠壓到正中神經,產生疼痛。因為正中神經支配部份手掌和手指的皮膚感覺[註1],會造成大拇指側三指半邊手掌及手指的酸麻或疼痛感,另外因為正中神經也支配大拇指基部的魚際肌,因此也有可能造成大拇指有使不上力的現象。
正中神經支配拇指掌側、食指和中指,無名指的一半以及手指甲床的皮膚,手掌外側的部分有正中神經掌側皮支支配,於手腕處發出。掌側皮支穿行在橈側腕屈肌旁單獨分割的筋膜間隙內,然後進入屈肌支持帶淺層。(如圖)(wikipedia, 正中神經)
此句原文為「因為正中神經支配手掌三又二分之一的皮膚感覺」
橈神經走在我們上臂的後面,位在肱三頭肌跟肱骨之間,大約在肱骨中下段時,會呈螺旋狀從內側往外側轉,之後就會往前臂大拇指側走。主要支配上臂的肱三頭肌以及前臂所有伸肌。
有些男子會罹患所謂的「蜜月手」,理由是因為女伴徹夜枕著他的手臂睡覺,橈神經長時間被壓迫而酸麻無力,因為這種情況常發生在兩情繾綣的新婚階段,才會有「蜜月手」的別名。雖然被當枕頭的部位是上臂,但酸痛會延伸至前臂的背側跟手背,導致手腕無法伸直,那是因為橈神經受壓迫時,影響到前臂背側的伸肌。若罹患了「蜜月手」,不嚴重的情況,只要別再枕著手睡覺去壓迫神經,過陣子也就自然好了,但若情況嚴重,就得尋求專業治療。

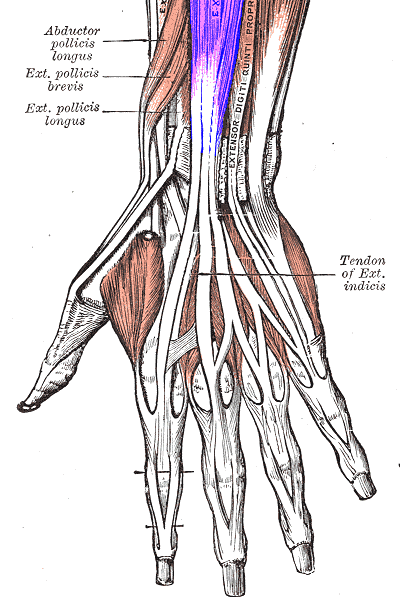
關於橈神經,還有一種常見的病症叫做「橈骨莖突部狹窄性腱鞘炎」,也就是俗稱的「媽媽手」。通常是因為經常反覆做大拇指伸直及外展的動作,影響到大拇指側手腕部位的外展拇長肌及伸拇短肌。在姿勢不當或過度使用下,容易使這兩條肌腱的腱鞘(即肌腱周圍用來保護潤滑的囊狀構造)發炎腫脹增厚甚至沾粘,當運用這部位時,肌腱在狹窄的腱鞘中一移動,就壓迫到橈神經,導致疼痛。許多母親為了抱孩子,長時間撐大手掌,過度使用外展肌跟伸拇短肌,導致肌腱腱鞘發炎,因故得名,但這可不是媽媽的專利,凡是需要大量使用大拇指的人,都有可能遇到這種問題。
至於尺神經,則是支配前臂及手掌靠小指側的部分肌肉,及小指、無名指靠近小指這一側二分之一部位的皮膚感覺。有時候我們不小心敲到手肘內側,會立刻產生一陣刺痛酸麻,俗話說這是「敲到麻筋」了,就醫學上來說,其實是刺激到尺神經了。因為尺神經由上臂往前臂延伸時,在手肘內側走得很淺,只是繞在肱骨旁邊而已,只要敲到,就會立刻有酸麻反應。
「執子之手,與子偕老」的科學解釋?
除了神經,當然也會讓學生觀察肌肉。在上肢部分,手臂的肌肉算是蠻單純的,上臂後方只有一條伸肌(用以伸展手肘),為肱三頭肌;而前面則是屈肌(用以彎曲手肘),共有三條,分別是:肱二頭肌、肱肌和喙肱肌。而前臂的肌肉也大致分為前方的屈肌和背側的伸肌,負責控制手腕與手指的動作。
前臂的動作較單純,主要是彎曲、伸直、旋前(手心向下)及旋後(手心向上),但我們的雙手及手指頭還可以做握拳、內收、外展、對掌等精細動作,那是因為人類手掌構造非常精細,除了手掌內部就有十九塊肌肉各司其職外,手指部分更有由前臂肌肉延伸過來的肌腱控制指頭的動作,這也是人類雙手之所以這麼靈巧的原因,但也因此,手部若遭受嚴重損傷,手術難度是很高的。
談到手掌肌肉及肌腱執行的動作,不禁想起一件生活趣事。有一次家人一起聊天,我小叔跟大家提起一段網路上廣為流傳的影片「無名指的秘密」,影片中的敘事者先拋出一個問題:「為什麼婚戒要戴在無名指上?」敘事者說,關於這個問題的答案,華人有一個很奇妙的傳說:首先,他伸出兩手,將中指彎曲,對靠在一起;接著,將其他四個手指分別把指尖對碰在一起。

根據影片敘事者的說法,不同手指象徵著不同的人際角色:中指代表的是你自己,大拇指代表的是你的父母,食指代表手足,無名指代表配偶,而小拇指則代表子女。
把中指對好以後,他便逐一試著分開每一對指尖相碰的手指。大拇指輕易就分開了,意味著我們的父母總有一天會老去,離開我們。接著,合上大拇指,再試著張開食指,也輕易分開了,意味著兄弟姊妹終究會各自成家,擁有自己的人生,也會離開我們。接著,試著分開小拇指,也很容易,這意味著子女會長大,遲早會離開自己,建立他們的家庭。最後,敘事者要大家試著分開無名指,跟剛剛不同的是,無論怎麼努力,都無法把指尖相碰的無名指分開。
影片的意義是:這世間任何人際關係都會改變,即使親如父母子女,也無法例外,只有配偶才是終身與你相守、跟你關係最緊密的那個人。結論是:所以婚戒才要戴在無名指上。我想第一次體驗這個小遊戲的人都會覺得很驚奇,再搭配上這麼浪漫的說法,應該會覺得很感動吧?尤其是女性,應該對這個小遊戲更有感覺,心中恐怕會立刻湧現「執子之手,與子偕老」的滿腔柔情。
我第一個反應也頗驚奇,但驚奇的不是這個浪漫的「無名指的秘密」,而是:「能想出這個遊戲的人真不簡單,他應該具備蠻多解剖學的知識。」為什麼呢?因為他知道大拇指、食指、小指自己都擁有一條獨立的伸指肌,此外,人體的手背有一塊來自前臂背側的伸指肌,這塊肌肉有四條肌腱,分別會到食指、中指、無名指及小拇指這四個指頭。但因為是共用同一條肌肉,所以會彼此影響,一旦中指彎曲,會影響到那一條伸指肌的有效收縮,於是就沒有足夠力量讓沒有獨立伸指肌的無名指分開;而大拇指、食指、小指因為有獨立的伸指肌,就不受影響,可以順利分開。
如果把無名指彎曲,就會發現所有的手指都能順利分開;若把食指彎曲,不容易分開的則變成直接被牽制的中指。總之,因為無名指沒有獨立的伸指肌,所以相對其他手指,它比較缺乏力氣,所以鋼琴師才必須特別鍛鍊無名指,以強化無名指的力道。說真的,我還真想去認識一個頂尖的鋼琴師,看看他中指彎時,相碰的無名指尖是否能順利分開呢,畢竟,他們可是有下苦功練過的,說不定可以突破這種限制。
經過我一番「專業科學」的解釋以後,所有浪漫旖旎的氣氛當場煙飛雲散。小叔忍不住揶揄說:「妳們學科學的女生還真無聊……」
哎呀呀,怎麼能這麼說呢?風花雪月是詩人的工作,而我們學科學的人,必須求真啊 !我學了這麼多年解剖,又教了這麼多年解剖,人體的神經、血管、肌肉的分布與運作方式,早已內化成自己的一部分,「無名指的秘密是什麼?」噢,對我來說,大體解剖學早已告訴了我解答。
對醫學以外的人來說,解剖學深奧複雜,對大體既是好奇又害怕。解剖室裡到底發生了什麼事情?醫學生如何忐忑地切下第一刀?《我的十堂大體解剖課》,八旗文化出版。






























