搜尋
登入/註冊
徵才!
最新
文章分類
人體解析
地球脈動
太空天文
文明足跡
環境氣候
生命奧祕
科學傳播
科技能源
自然演化
萬物之理
醫療健康
電影中的科學
Lab
【核四公投】模擬器
【反萊豬公投】模擬器
【藻礁公投】模擬器
從打掃方式看出你是哪種人?
你是哪個系的寶可夢大師?
防疫小尖兵測驗!
你能得到搞笑諾貝爾獎嗎?
用陰謀論測你的陣營!
世界地球日知識大挑戰!
用陰謀論測陣營─外星人篇
【光棍節】你是哪種單身?
會考考題大挑戰!
精選特輯
所有特輯
搞笑諾貝爾獎
童年崩壞!?
一切都是泛科學的陰謀
她是科學家
百工裡的科學人
SDGs
讀力書展
社群
YouTube
Facebook
Instagram
Line
Podcast
搜尋
登入/註冊
+追蹤
可壓折機器人
1 篇文章・ 0 位粉絲
+追蹤
常用關鍵字
仿生機器人
六足機器人
可壓折機器人
可輾壓機器人
小強
昆蟲
機器人
破解動物忍術
蟑螂
輾壓
所有文章
熱門文章
由新到舊
由舊到新
日期篩選
由新到舊
由舊到新
日期篩選
選擇年份
2020年
選擇月份
3月
動物世界
三民書局
・2020/03/10
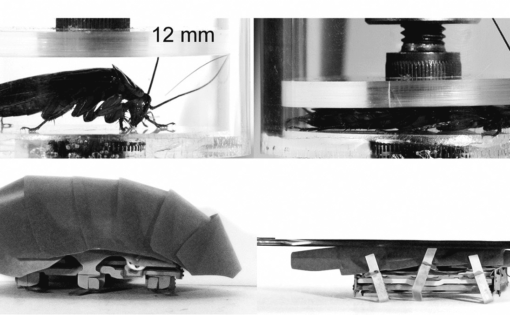
小強求生術(下):人類有辦法打造跟蟑螂一樣「抗壓」的機器人嗎?——《破解動物忍術》
2009年科學家結合堅硬的零件和柔軟的零件,創造出「動態自主式爬行六足機器人」它每秒可移動自己的一個體長距離,但卻有一個根本問題是它無法被輾壓。研究人員是如何將它重新設計為可輾壓機器人?而在可輾壓之後,卻無法順利前進,又該如何解決?
仿生機器人
六足機器人
可壓折機器人
可輾壓機器人
小強
昆蟲
機器人
破解動物忍術
蟑螂
輾壓
5
0
繁
简