2021 年 12 月 16 日,一名來自邁阿密大學的大氣科學家──Brian Mapes(布萊恩.馬帕斯)於美國地球物理聯合會(American Geophysical Union,AGU)所舉辦的秋季會議中,提出近期於西印度洋所觀察到之新興天氣型態, 一種長時間存在於大氣中,移動緩慢的水氣團 ,「大氣湖泊」(Atmospheric lake)!
神秘大氣湖的手足:容納一整條河的大氣
過去當我們提及「大氣」二字時,腦海中冒出的第一個想法通常是充斥在我們生活周遭的氣體:人類呼吸作用所需之氧氣、佔大氣比例最重的氮氣、耳熟能詳的溫室氣體甲烷,或是二氧化碳…。
但你知道,在大氣中同樣也具有似河川一般流動的水氣傳輸通道嗎?
在大氣的對流層中,有一條結構狹長且連綿不斷的水氣運輸通道,科學家將其稱為「大氣河流」(Atmospheric river)。大氣河流中主要的水氣源自於溫暖潮濕的熱帶地區,而順著大氣河流流動至較高緯度的區域,並以降雨(雪)之形式落下。

最著名的大氣河流是一條被稱作「Pineapple Express」的強大水氣傳輸通道!(因其經過盛產鳳梨的夏威夷群島,故被稱作鳳梨特快)這條大氣河流會將位於夏威夷地區的溫暖水氣帶到較高緯度的美國西海岸,造成加利福尼亞州當地降下豪雨或大雪,於此同時,大量降下的雨水(雪)也是美國西海岸重要的淡水來源。
但強大的大氣河流有時也會造成洪患的災情,在2021 年 11 月,美國西部與加拿大西北部便受到 Pineapple Express 的影響,太平洋熱帶海域所蒸發的水氣大量被帶往美洲西岸,造成豪雨襲擊,甚至造成單日降下該地近一個月的總雨量,造成加拿大卑詩省當地的嚴重災情。
一整團漂浮的……湖水?
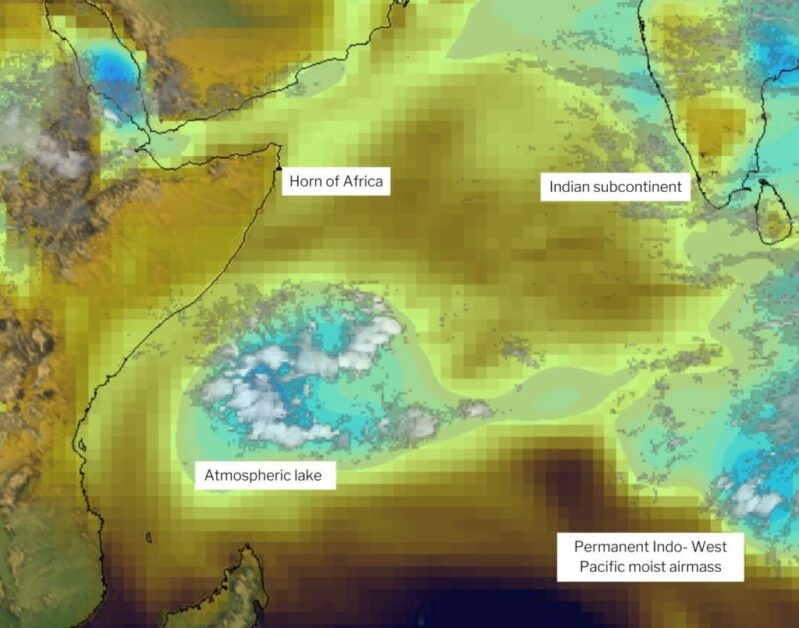
而 Mapes 所發現的大氣湖泊,最初只是在印度洋-太平洋海域上方的水氣,並逐漸從印度洋往非洲移動。與大氣河流相異的地方在於,當大氣湖泊在移動時,會逐漸與產生湖泊的天氣系統分離、收縮,最終聚集成孤立的水氣團,緩緩地漂浮在赤道周遭的海洋區域,而並不像大氣河流般快速的前進並帶來降雨。
更準確地來定義,大氣湖泊的現象之所以需要被解釋,最主要是因為當中所包含的水氣是足以造成大量降雨的水氣含量,但卻又與過去我們時常接觸到的氣旋形成過程與現象,抑或是現今較為了解的大氣河流表徵大為不同,更是增添了其特別之處。
在查看近五年的衛星數據後,研究團隊總共發現 17 個大氣湖泊!
這 17 個大氣湖泊,皆位在赤道 10 度以內的區域(若湖泊遠離赤道,也可能逐漸變成熱帶氣旋),且存在於大氣中的時間皆超過 6 天,而最長壽命的大氣湖泊,更是在空中停留整整 27 日!透過計算更是得出:若將大氣湖泊中所含之所有水氣凝結成肉眼可見的水,將會形成一個僅有幾公分深,但約有 1000 公里寬的大水坑!
旱災的另類解套方式?!
目前發現大氣湖泊的區域──印度洋-太平洋海域地區旁的非洲東海岸,因長年受到副熱帶高壓的壟罩,盛行下沉氣流,造成非洲東海岸全年乾燥少雨,降水量極為稀少,當地的水資源也相對匱乏。若找到方式使東非上空附近的大氣湖泊水氣大量降下至地表,也許便能為東非國家的乾燥地區帶來更多的水資源!
再者,因東非氣候長年乾燥,所以當偶然出現大雨時,必定也會被當地居民所記錄!Mapes 認為透過深入探索東非當地的知識後,或許會搜尋到與大氣湖泊相關資料,讓科學家更進一步了解大氣湖泊。
「這是一個十分乾燥的地區,所以如果大氣湖泊出現時,對這一地區一定十分重要!」(“It’s a place that’s dry on average, so when these [atmospheric lakes] happen, they’re surely very consequential,” Mapes said.)

踏上神秘湖泊的探索之路!
Mapes:「將大氣湖泊帶到近岸的風十分特別,他的風速趨近於零,也就代表,幾乎所有事件都可能影響著大氣湖泊的移動。」
大氣湖泊什麼情況下會產生?大氣湖泊為何會與產生的源頭分離?推動大氣湖泊的大氣模式為何?為什麼大氣湖泊在印度洋-太平洋區域會向西移動?種種有待被解決的疑問,使 Mapes 和研究團隊開始計劃使用更多的衛星數據與每日的密切觀察來研究這新興的天氣型態。
過去的天氣觀測方式主要著重在月份的降雨與水氣研究等,而較少著墨於每日的水氣變化,Mapes 推估這也是為何大氣湖泊至今才被發現的原因。故研究團隊傾向利用詳細的衛星分析資料,了解每日水氣的變化是否會影響著大氣湖泊的生成,希望透過更多的研究來來了解大氣湖泊的起源與成長!
參考資料
- What Is an Atmospheric River?(https://scijinks.gov/atmospheric-river/)
- What are atmospheric rivers? Learn more about these rivers in the sky(https://www.noaa.gov/stories/what-are-atmospheric-rivers)
- RESEARCHERS IDENTIFY NEW METEOROLOGICAL PHENOMENON DUBBED “ATMOSPHERIC LAKES”( https://news.agu.org/press-release/researchers-identify-new-meteorological-phenomenon-dubbed-atmospheric-lakes/)
- Scientists Identify a Previously Unknown Type of Storm, Called an ‘Atmospheric Lake’(https://www.sciencealert.com/a-new-type-of-storm-has-been-identified-called-an-atmospheric-lake)
- Atmospheric lakes bring much-needed rain(https://earthsky.org/earth/atmospheric-lakes-rain-indian-ocean-africa/)