

圖、文/謝瑩霖
協助採訪/虎尾科大航空機電系統整合實驗室

第一次聽到無人飛行器的讀者,應該都會馬上聯想到出現在電影中執行軍事偵察的無人飛行器吧!但其實不管是航空攝影、環境空汙品質監測、農漁業觀測、交通監測,甚至是危險環境的調查,都可以看到飛行器的蹤影。近年來更是出現許多來自大專院校或私人單位的無人飛行器社團,此次非常有幸可以來到國立虎尾科技大學的飛機工程學系,採訪由鄒杰烔老師所引領的航空機電系統整合實驗室(AESI),現在就跟著他們一起翱翔天際吧!
實驗室沿革

虎尾科技大學的飛機工程學系共可分為「航空科技」與「電子科技」兩大組別, 而在民國100 年成立航空機電系統整合實驗室之前,原本的研究方向是以居家照護機器人、服務型機器人與六足機器人為主。之後便以「系統整合」為教學重點, 結合不同領域的學生們,希望藉此發展出一套結合航空機電技術、智慧型機器人與無人飛行器的完整系統。而帶領AESI實驗室的鄒杰烔老師則認為無人飛行器不僅是只有飛行器(UAV) 而已,必須要搭配一座可以進行資訊接收與傳送的地面導控站,這樣才能成為一套完整的無人飛行器系統(UAS)。
此實驗室成立至今已有三年多的時間,在這段期間內所開發的飛行器都是由學生們自己設計CAD 檔, 再透過三軸CNC 雕刻機加工所製成。更因為實驗室先前的重點是地面機器人,所以也相當熟悉如何應用各種感測器來處理避障與定位等功能。除此之外,AESI 實驗室也在許多比賽中嶄露頭角,先前他們曾榮獲第八屆全國大專生創新設計實作競賽的冠軍,以及臺灣無人飛機創意設計競賽自動導航組的亞軍,更有國內重機團體邀請他們協助拍攝一年一度的重機大集合,可說是經歷豐富。

無人飛行器與其他硬體
一進到AESI 實驗室,放眼望去全是無人飛行器,不論是定翼機、雙旋翼或多旋翼,幾乎想得到的類型這裡通通有,接著,就讓我們依照螺旋槳的數目,來瀏覽各種類型的飛行器吧!
單旋翼(一顆DC 無刷馬達、四顆伺服機)
單旋翼飛行器僅使用一顆DC 無刷馬達來轉動螺旋槳以提供升力,由於單旋翼的升力有限,為了要使其得以順利升空,機身採用了兩片輕量化珍珠板以交叉的方式組合。但此種做法會產生機身自旋的現象,因此在每一面珍珠板的下半部都需要加裝一顆伺服機來調整舵片角度,以抵消自旋的力量。

雙旋翼(兩顆DC 無刷馬達、兩顆伺服機)
雙旋翼飛行器又可分成同軸雙槳與左右旋翼兩種,同軸雙槳是將兩個轉動方向相反的螺旋槳裝在同一個轉軸上,藉此來消除自旋的現象,這種做法產生的升力也會比單旋翼來得稍大一些。另一種則是左右旋翼,看起來與一般定翼機非常相似,而這類飛行器也曾在電影《阿凡達》中出現。雙旋翼飛行器利用兩側機翼上轉動方向相反的螺旋槳來抵消自旋現象,並透過改變機翼與機身間的伺服機角度來改變機翼方向,藉此移動整架飛行器。

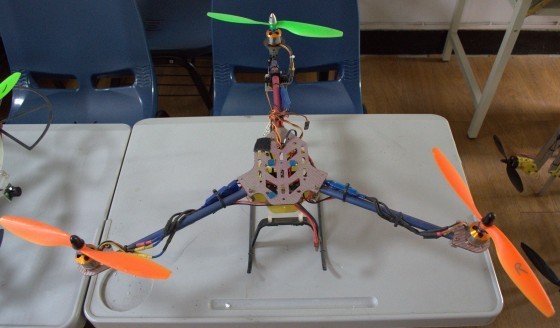
三旋翼(三顆DC 無刷馬達、單顆伺服機)
此類型的飛行器又可稱為「Y3」,在三片間隔120 度的機翼上分別裝上無刷馬達,同樣利用馬達間的差速變化來移動;但「Y3」在飛行時的自旋現象抵消程度比雙旋翼來得差一些,因此必須要透過裝有伺服機的尾舵螺旋槳來保持平衡。也因為如此,在調整這類型飛行器時,必須要正確地設定PID 控制參數的數值, 一旦尾舵的螺旋槳沒有配合好,整架飛行器就會有墜落的危險。
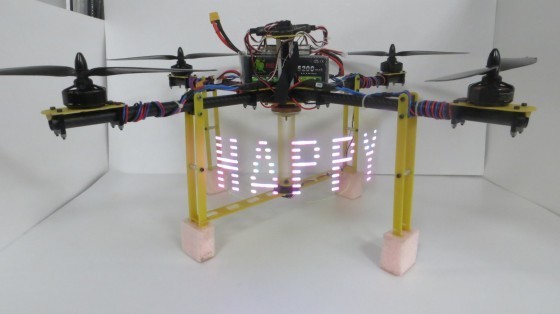
四旋翼(四顆DC 無刷馬達)
在無人飛行器中, 最廣為人知的莫過於四旋翼飛行器了,其中又分為「十4」、「X4」與「Y4」三種機身結構,目前有許多飛行器玩家喜愛使用四旋翼飛行器來進行空拍攝影;但由於「十4」的馬達會擋到攝影機的鏡頭,所以大部分的空拍攝影都會選擇「X4」的結構。而較少見的「Y4」則是在尾舵用一組同軸雙槳的無刷馬達來代替原本的伺服機,藉此降低容易導致自旋現象產生的馬達轉距。

六旋翼(六顆DC 無刷馬達)
要增加升力與載重能力, 最簡單的方法便是增加更多的螺旋槳。而一般的六旋翼飛行器又可分成「米6」、「Y6」與「H6」三種結構。較常見的「米6」是「X4」的強化版本, 在六片夾角同為60 度的機翼裝上螺旋槳,提高無人飛行器的升力;但另一方面,這會使得飛行器的體積變大,耗電量也會變得比較高。於是為了在縮小體積的同時避免自旋現象產生,便將原先的「Y3」結構改造成具有三組同軸雙槳的「Y6」,雖然升力比「米6」小了一點,但是體積與靈敏性卻可彌補這項不足。


定翼機與傾轉旋翼
定翼機看起來其實就像滑翔翼,但為了要讓滑翔翼飛得更遠,必須利用機身後方的大型螺旋槳來提供較大的推力;而為了可以承載機身中央的重量, 機翼的外型必須設計成大且長。為了要讓這樣的機體可以順利起飛,學生們特別設計了一座發射架,藉由彈簧的拉力將定翼機推向空中。


其中,最特別的莫過於傾轉旋翼的設計。這種做法同時結合了定翼機與旋翼機的特色,在起降時可以利用四顆DC 馬達驅動螺旋槳,來進行垂直起降,或是與一般定翼機一樣利用長跑道來減速降落。若是垂直起飛到一定高度之後,可以再改變螺旋槳的角度切換成定翼機的推進模式。此外,透過機翼的輔助也能拉長飛行的時間與距離。

飛行輔助工具
當然,除了螺旋槳之外,還是需要配置其他硬體才能做到影像拍攝、飛行器定位與地形量測的功能。現在最流行的空拍攝影機則非「GoPro」莫屬,但有了攝影機還是不夠的,必須要額外加裝能夠安裝攝影機的全向雲臺。若想知道雲臺的製作方法可以參考《Make》國際中文版Vol.13 中的〈如何製造四旋翼〉一章。
再來則是飛行器的定位功能,可以大致分成室內與室外這兩種環境。目前市售的飛控板通常都會內建GPS 定位系統,所以在室外飛行時,可以透過GPS 回傳的訊號找出飛行器的所在位置。若換成室內,則可以選擇使用超音波距離感測器,利用超音波發射與接收的時間差來算出飛行器與環境中障礙物的距離,並藉此反向推導出飛行器的位置。在起降時也可透過超音波感測器來計算出飛行器與地面相隔的距離,以避免飛行器降落過快而摔壞。

上面所提到的空拍影像與定位功能,都需要有一個可以接收訊號的地面導控站與追蹤天線。先利用追蹤天線接收飛行器送回的GPS 定位座標與其他偵測結果,經過導控站的計算與判斷之後,再經由更改裝設在追蹤天線上的Arduino 數值來改變兩顆伺服機的角度,使得追蹤天線永遠朝向飛行器的位置。同一時間,地面導控站上的螢幕也會顯示出飛行器的所在位置、電量、飛行路線與偵測到的各項資訊,這樣一來才稱得上是一套完整的無人飛行器系統。


研究方向與未來應用
目前AESI 實驗室有許多有趣的研究方向,包含:視覺暫留、視覺辨識、超音波定位、充電平臺、非對稱多旋翼、傾轉旋翼與油電混合飛行器。


負責開發嵌入式機器視覺的張東琳同學表示,室內的定位通常會採用超音波和紅外線感測器;但為了要使飛行器具有更高的智能表現,他們打算透過攝影機使飛行器可以自主辨識起降點的顏色與位置,並打算搭載目前熱門的Raspberry Pi 單板電腦,讓飛行器可以不用再回傳資訊到地面的導控站進行運算,而是在空中完成拍攝、辨識、運算與控制這些動作。一旦飛行器具有自動辨識起降點的功能之後,便可與自動充電平臺相互結合,使其成為一架完全自主的飛行機器人。
到目前為止, 一般多旋翼飛行器可持續的飛行時數大約是20 分鐘左右,若是要產生更強大的升力,則會大幅縮短續航時數;為了改善此問題,AESI 實驗室也設計出油電混合的多旋翼飛行器,在上面搭載一般市售大型遙控飛機的汽油引擎,不只提高升力,也延長了續航的時間。
結語
看著老師或學生們在介紹無人飛行器時的神情, 可以想見對他們而言,這些飛行器不單純只是一個研究專題而已,更重要的是過程中所學到的知識,以及看見飛行器順利升空的那股喜悅。另外,鄒杰烔老師也認為:「學校應該推廣機電整合教育,結合不同科系的學生們互相學習,結合動手作的精神,讓學生們可以親手設計與製造各種專題。或是舉辦各種年齡層的比賽,從小紮根,以培養出更多基礎深厚的人才。」
無論是在臺灣還是在世界上,無人飛行器的發展可說正處於從學術、軍事應用轉入商業應用的階段,相信未來也會是大熱門。AESI 實驗室的設立與他們進行的研究,可說是為國內該領域注入了開發的活水。希望AESI實驗室能夠繼續秉持著他們對飛行機器人的熱情,突破現有的領域,開發出更多不同類型的嶄新飛行器;同時也把這股熱情傳遞出去,帶動飛行機器人的各種應用研究,進而開創新產業的契機,讓臺灣在國際上展翅高飛。

虎尾科技大學航空機電系統整合實驗室
https://sites.google.com/site/nfumulticopter/
文章原文刊載於《ROBOCON》國際中文版2015/1月號


































{kind=link}