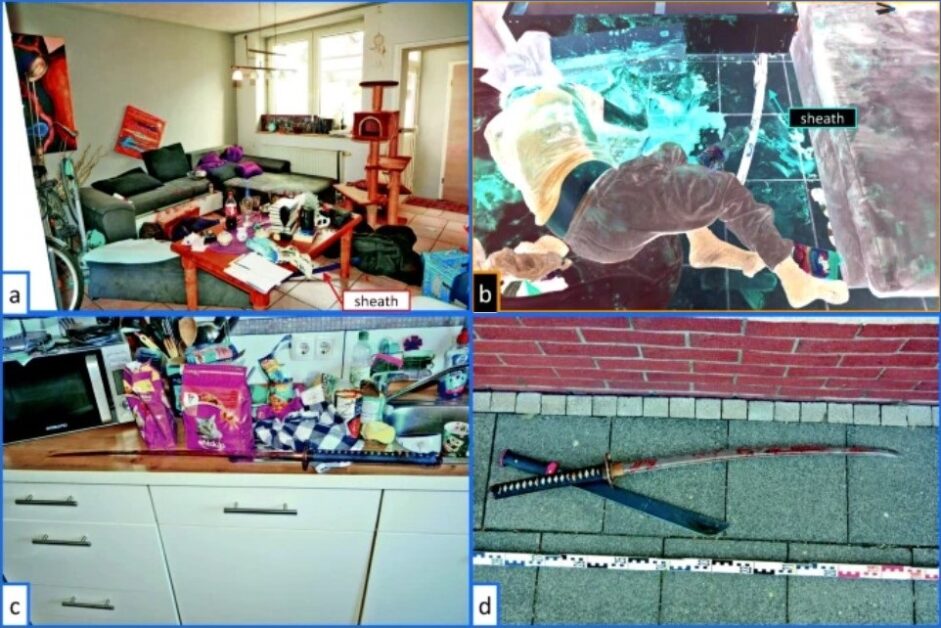
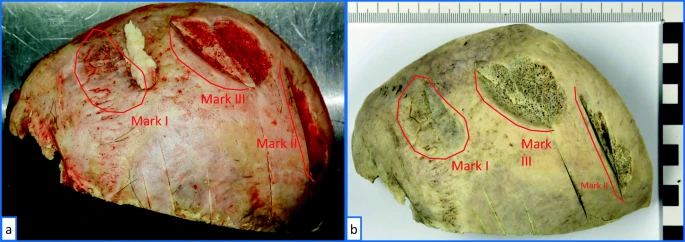
去除軟組織前後的顱頂上,編號 I、II 和 III 的傷痕。圖/參考資料 1,Figure 3(CC BY 4.0)
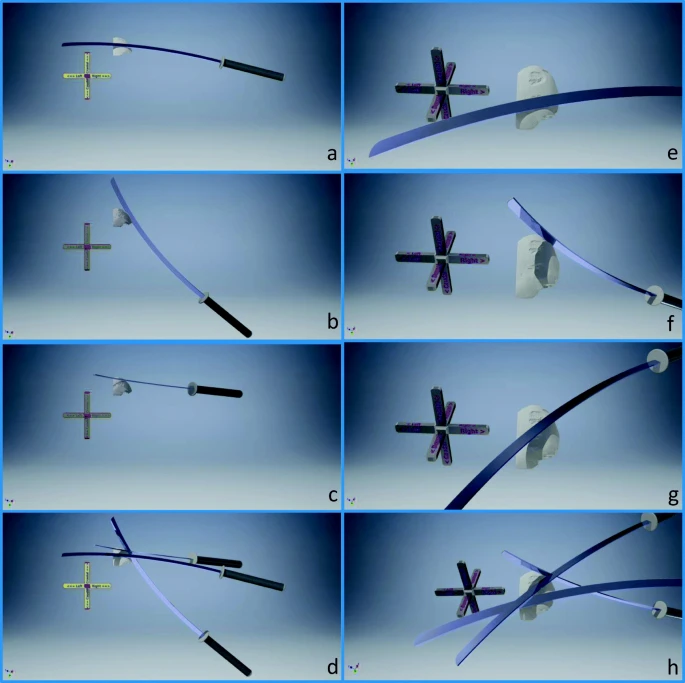
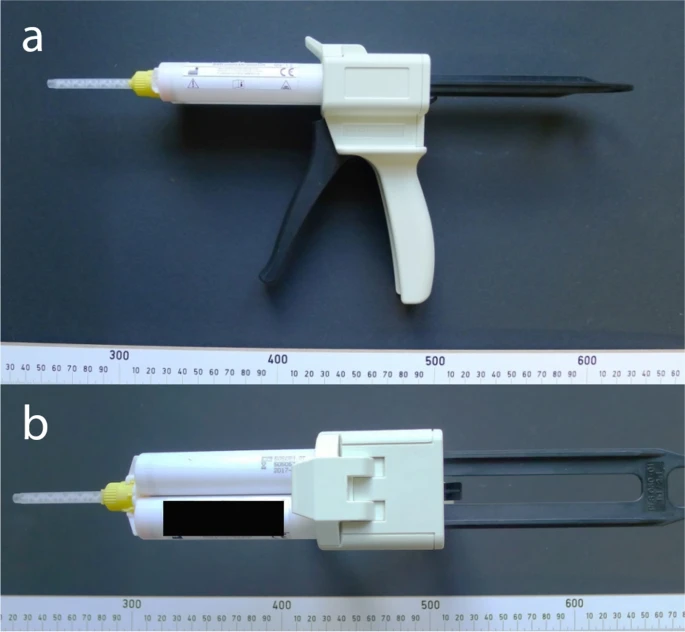
顱頂刀痕的模型完成之後,2 把武士刀也要準備一下。先以冷水洗去血漬,並用衛生紙擦乾。拿牙科翻齒模的 Cavex Set Up Wax 硬蠟片,在刀刃的紋路上翻模,再灌入 AccuTrans®,做出模型。[1]
-----廣告,請繼續往下閱讀-----
比對
鑑識團隊除了將顱頂刀痕和武士刀紋路的模型,放在 Leica FS-C 光學顯微鏡下,打斜光比對;也使用辦案專用的 ToolScan 3D 掃描器與 Lucia Forensic 3D 比較軟體加以分析。他們又拿一般硬度的 Cavex Set Up Modelling 蠟片與褐色的 AccuTrans® AB 鑄造材料,再次製作模型,掃描並分析,以驗證結論。[1]
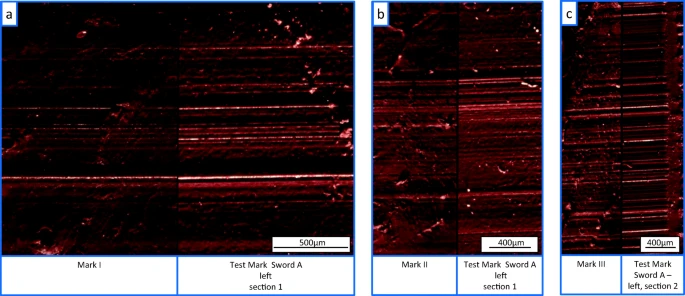
光學顯微鏡下,顱頂刀痕 I、II 和 III 跟武士刀 A 紋路的比較。圖/參考資料 1,Figure 5(CC BY 4.0)
判決
3 道刀痕都與武士刀 A 吻合,儘管這個結果不能排除 B,但至少證明 A 絕對是兇器。鑑識團隊 3D 電腦斷層掃描顱頂,並將結果匯入電腦輔助設計軟體 Autodesk Inventor,再繪製武士刀 A 配合呈現。然後於法庭上以此系列圖像,展現揮刀的方向與砍傷的時序。最後,兇手因過失殺人被判 9 年徒刑,並強制勒戒。[1]
以 Autodesk Inventor 繪製的武士刀 A 砍顱頂示意圖。圖/參考資料 1,Figure 9(CC BY 4.0)
蝴蝶的美,源於牠們擁有的千變萬色的翅膀,這些色彩是門面,也是保護傘,鮮豔顯目派警戒掠食者別靠近!小心牠們有毒(即便有些蝶其實没毒 XD);擬態派能巧妙地偽裝成自然環境中的枯葉、樹木等騙過掠食者的眼睛,或是如猛禽眼睛樣貌的翅膀,嚇唬掠食者。多數蝴蝶們視顏色為性命,但對玻璃翼蝶來說……就是不給顏色瞧瞧,幾近透明如玻璃的翅膀,即使飛行也如穿上一層隱形罩袍,讓大家都難以察覺牠的存在。究竟,這個蝶界的「小透明」是如何成長?又何以成為科學家們研發新型抗反射材料的重要靈感?Let’s check it out !
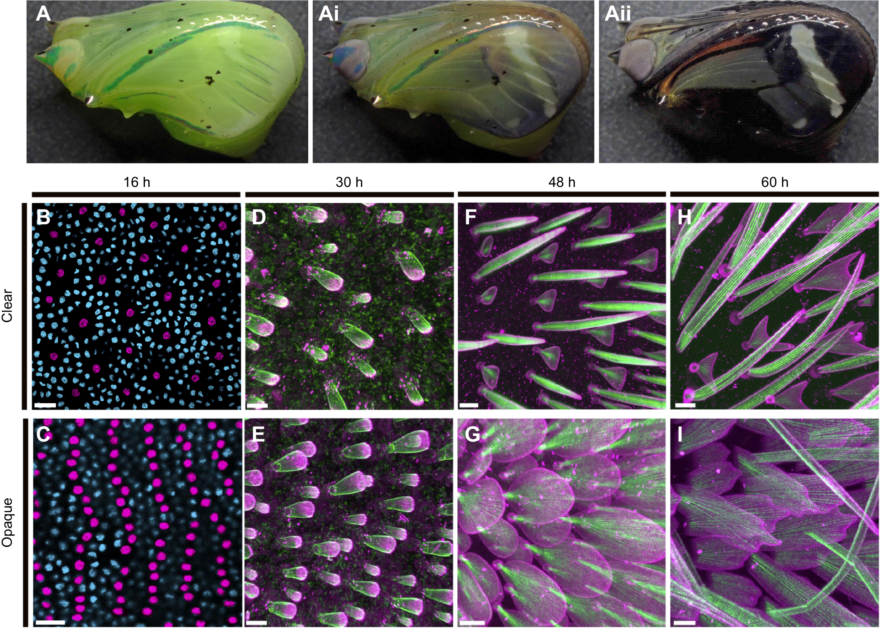
玻璃翼蝶是如何生成如此獨特的翅膀呢?帕特爾(Nipam H. Patel)和他的同事們首度將玻璃翼蝶詳細的成長時間序公開於《實驗生物學期刊》(Journal of Experimental Biology),他們分別在其成蛹不同時間點(16, 30, 48, 60 hr)進行解剖,並觀察其生成翅膀型態的變化(如圖一)。
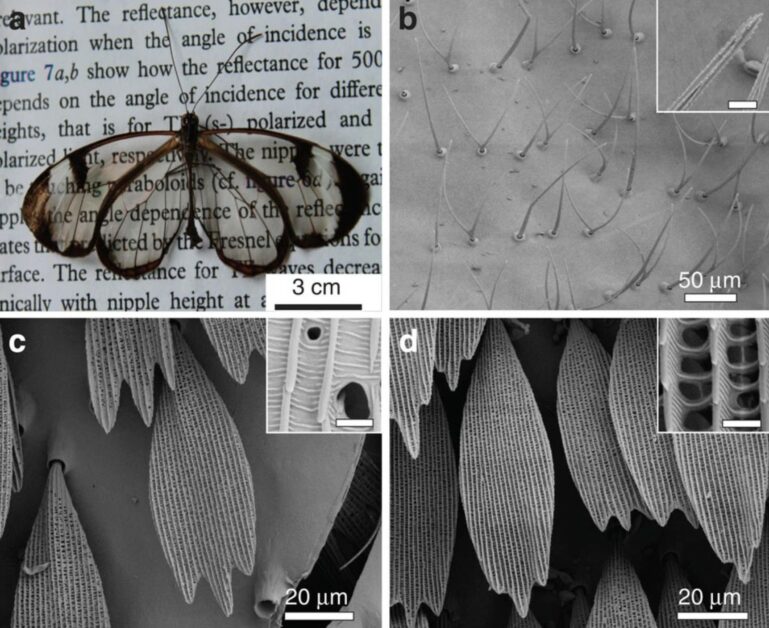
這項驚人的發現不只有帕特爾等人注意到,卡爾斯魯厄理工學院(Karlsruhe Institute of Technology)的研究團隊也曾於 2015 年在《自然通訊》(Nature Communications)期刊發表,玻璃翼蝶翅膀表面不規則的奈米結構能降低反射,並透過蝕刻沈積技術(etching techniques)製造了仿透明蝶翅的塗層,厚度僅 500 奈米,且具有防水及自潔功能。
















-200x200.jpg)



















{kind=link}