

儘管人類的科技不斷進步,但想要一探海底世界仍然是非常大的挑戰。
不僅海洋的水流捉摸不定,深海裡黑暗、冰冷與高壓的環境,都是水下工作最難以克服的地方,傳統是由潛水人員來進行水下作業,不過人體在水中有下潛的極限,這時候就有請水下機器人啦。

專攻水下機器人的台大教授郭振華表示,一般而言,水下機器人大致可分成兩種,一是「遙控式水下機器人(Remotely Operated Vehicles, ROV)」機器人本身以纜線與海面上的船隻聯繫,由船隻提供電力並且遙控機器人,機器人再將收集到的資料透過纜線傳回船上,人類為主要操控者,這樣的機器人不怕沒電,而且可以負荷很重的工具,例如機器手臂,所以多數應用在工業用途上。另一種是「自主式水下機器人(Automous Underwater Vehicles, AUV)」,其中也包含了「自主式水下滑翔機(Autonomous Underwater Glider, AUG)」這兩種都沒有纜繩繫縛,是靠電池來維持電力,靠感測器與人工智慧自主在水中執行任務,以聲納、光學等方式跟岸上通訊,進行定位並且傳遞訊息。自主式水下機器人可以巡遊很遠的範圍,還可以在定點停駐進行觀察,機動性很高,不過相對的風險也很大,一旦通訊系統故障,就可能會遺失了。
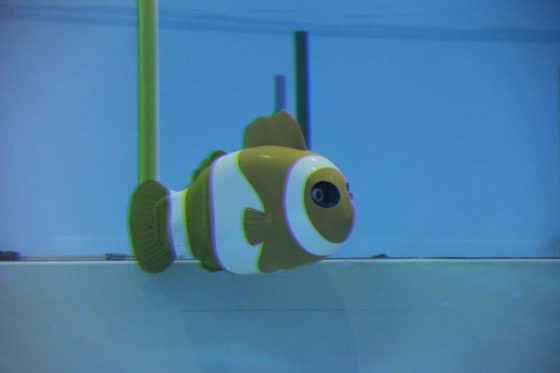
郭振華教授的「水下載具實驗室」中有兩架可愛的自主式水下機器人「 Nemo 」與「 Iron Fish 」。外表長得像可愛小丑魚的 Nemo,主要的功能是在海科館中與觀眾進行互動,是水中的服務型機器人。Nemo 的身體構造模仿魚身採用仿魚鰾作為浮力控制,它的移動全部仰賴矽膠製、可彈性擺動的尾鰭,帶著它完成前後、左右、上下的六個自由度,要利用單一個尾鰭來完成機器人的所有運動方式,是非常不容易,這個部分的研發也讓團隊著實花了好多力氣。另外,在研發 Nemo 的過程,由於這個機器人是要放置在海科館的魚缸中,在一個由玻璃環繞的固定範圍內巡遊,這也考驗了團隊的技術,原因在於機器人在水中是靠著影像處理與感測器來判斷環境,當環境太過於複雜,影像處理如果不夠快就會產生問題,而魚缸的透明玻璃也會讓機器人在判別上出現問題,一不小心就會撞上。最後他們想出在Nemo 的鼻子、身體與尾巴裝上壓力計,透過偵測水壓的方式,讓 Nemo 可以貼著魚缸游,也可以順利避開水中的障礙物。
而擁有純白色機身,眼睛部分有黑色半透明眼罩的 Iron Fish,是利用尾鰭的螺旋槳來控制前進與轉彎,搭配胸鰭的升降動作,可以高速迴旋與下潛,移動非常迅捷。Iron Fish 原本是利用聲納來跟岸上進行通訊聯繫,現在則開發出速度更快的光學通訊系統,運用雷射光以及魚身上的光感應器在水底的兩隻魚可以互相傳遞訊息,研究人員也可以透過雷射光跟機器魚進行通訊,將所偵測到的資訊傳回岸上。

不過,要研發水下機器人並不容易,因為在水中的物體會受到流體力學、水壓、水流等等複雜因素的影響,實驗測試還必須要看老天的臉色,海象不佳就無法測試,因此研發進度會受到影響。另外,機器人的防水要做到非常嚴密,否則一旦機器人進水,設備經常就全毀了。在海中遊動的機器魚還有令人意想不到的危機,那就是會遭遇到大魚的侵襲,機器人被咬到也時有耳聞,還好它們為了負荷水壓,都配備有非常堅固的外殼,才不至於被咬壞。
儘管水下機器人的研發困難重重,不過郭振華仍樂此不疲,製作出一個像魚一樣可以永遠待在水中不用上岸的水下機器人,是他未來最大的夢想。
本文摘自科學築夢大現場 02《歡迎光臨機器人時代!百變智慧機器人》,親子天下出版。











